




PID控制算法其实指的就是比例、积分和微分控制,如下: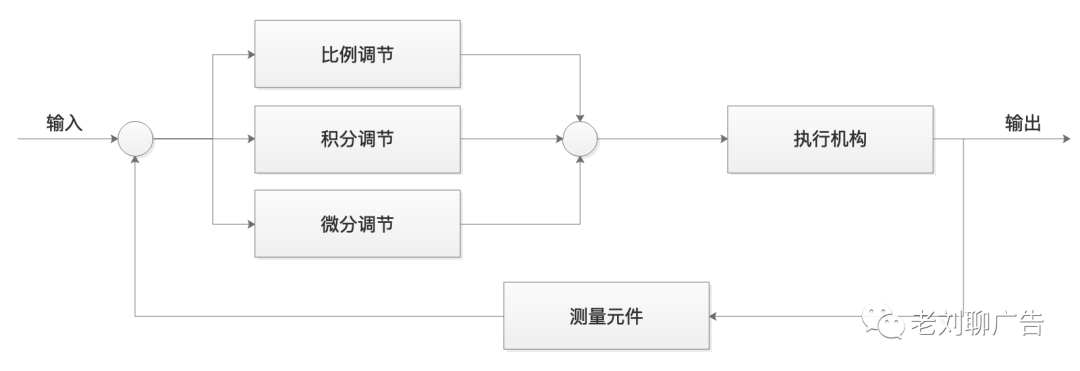
可以用下面的公式表示:
比例控制算法
假设有一个水缸,初始时水缸里的水高度是0.2米,目的是要保证水位维持在1米的高度,那么现在的水位距离目标水位之间存在一个误差。假设现在旁边有个人通过往缸里加水的方式控制水位,则比例控制算法的运行方式如下:
加入水的量与误差成正比,即 t=1时,,使水位在0.4的基础上上升0.4,达到0.6 t=2时,,使水位在0.6的基础上上升0.2,达到0.8 ......
按照上述方式循环下去,水位最终会达到1米
但上述算法也有问题。假设水缸存在漏水的情况,每次加水过程中会漏掉0.1米高度的水,那么在水位达到0.8时,将不再变化。因为此时,每次往缸中加水的量是0.1,漏掉的水高度也是0.1,加入的水和漏掉的水相抵消,水位不会变化。这个问题就是稳态误差
积分控制算法
基于现实中普遍存在稳态误差的情况,再引入一个分量,该分量与误差的积分是正比关系。因此,比例+积分控制算法为:
还是以水缸加水的例子来说明,第一次的误差error是0.8,第二次的误差是0.4,至此,误差的积分(离散情况下积分其实就是做累加)是1.2。这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好地消除稳态误差
微分控制算法
考虑刹车的场景。平稳的行驶车辆,当发现前面有红灯时,为了使得行车平稳,基本上提前几十米就放松油门并踩刹车了。当车辆距离停车线非常近的时候,则使劲踩刹车,使车辆停下来。整个过程可以看作一个加入微分的控制策略。在离散情况下,微分就是error的差值,即t时刻与t-1时刻的差,则:
其中,kd是一个系数。可以看到,在刹车过程中,因为error是越来越小的,所以这个微分控制项一定是负数,在控制中加入一个负数项,作用是为了防止汽车由于刹车不及时而闯过了线。从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用,可以理解为刹车。当车距离停车线很近并且车速还很快时,这个微分项的绝对值就会很大,从而表示应该用力踩刹车才能让车停下来
再来看开头的那个公式,已经很清楚了。在离散情况下,可以转换为:
为了方便起见,将这些系数进行统一:
到这里,PID算法的原理和方法就说完了,剩下的就是实践了。在真正的工程实践中,最难得是如何确定三个项的系数,这往往需要大量的实验和经验来确定
