





软件以及由此延伸的功能和用户体验将是未来智能网联汽车的关键驱动。在“软件定义汽车”的新时代,软件功能发布将与车型发布分离,更多软件会快速迭代发布。如何确保汽车中高速迭代的软件质量可靠?从13.0开始,CANoe为此提供解决方案。

未来即软件,确保软件质量需要合理工具
软件系统测试全新产品

CANoe4SW和CANoe4Server
测试主要趋势是在软件开发过程中实现持续编译、持续测试和持续交付的自动化,确保被测软件系统的质量。
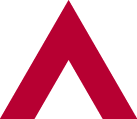
CANoe4SW(预计Q4/2020发布)用于开发、测试和分析软件组件、软件子系统和整个分布式软件系统,可访问各类非AUTOSAR嵌入式软件系统在Windows、Linux等环境中的虚拟执行,可在早期独立于硬件对软件系统进行验证,支持在Continuous Integration测试工具链中集成实现并行测试(AUTOSAR嵌入式系统软件可采用vVIRTUALtarget进行配置编译,加载在CANoe中实现SWC或ECU软件系统的验证)。
针对SiL测试的CANoe4SW
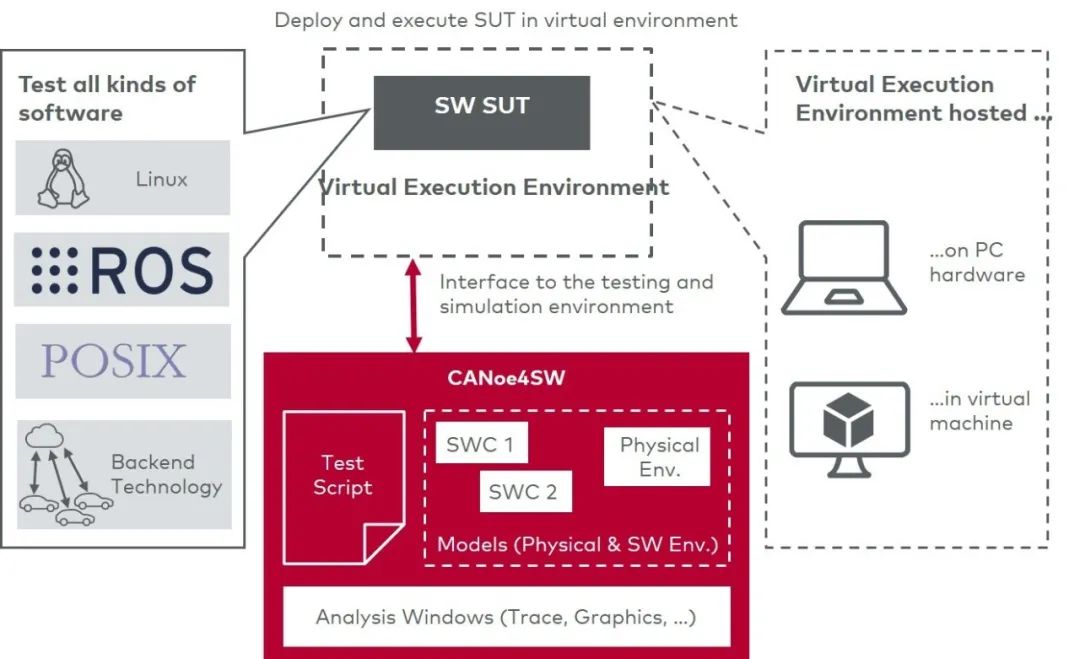
持续集成已逐步成为软件开发的重要手段,通过规模化的自动化测试环境部署可有效地加速验证纯软件系统。CANoe4Server(已与CANoe13.0一同发布)主要应用场景包括:ADAS软件系统版本每次更新后的海量场景验证,以及快速执行软件成功编译后的迭代验证。通过CANoe配置并导出工程,可在Windows Server和Linux Server部署实现SiL,其中Linux部署环境支持Ubuntu 18.04和CentOS 7.5,支持命令行控制与Jenkins集成。
并行可扩展SiL环境CANoe4Server
改善和增强SOA功能
Communication Setup更切合实际应用
CANoe中的Communication Setup采用“自上而下”解耦通信,以应用和接口为中心,通过协议Binding实现协议“捆绑”传输;而传统Simulation Setup窗口中采用“自下而上”的总线驱动,通过交互层API实现,这种方式在现今的应用中具有较强的局限性。
传统的Simulation Setup机制 | 全新的Communication Setup机制 |
总线节点仿真,支持CAN FD/CAN 、LIN、Ethernet等 | 13.0版本当前主要支持Ethernet和CAN FD/CAN |
具体的总线通信行为(报文、PDU、信号等) | 具体的总线通信行为和单纯应用逻辑抽象通信 |
AUTOSAR Adaptive系统残余总线仿真 | |
任意被测软件连接到后续CANoe4SW适配层接口 | |
通过vCDL或编辑器轻松扩展数据库文件或数据模型,解决ARXML编辑不便的困难 | |
通过MQTT连接物联网IoT设备(CANoe互联服务功能CFS) |
传统仿真创建和全新通信创建对比
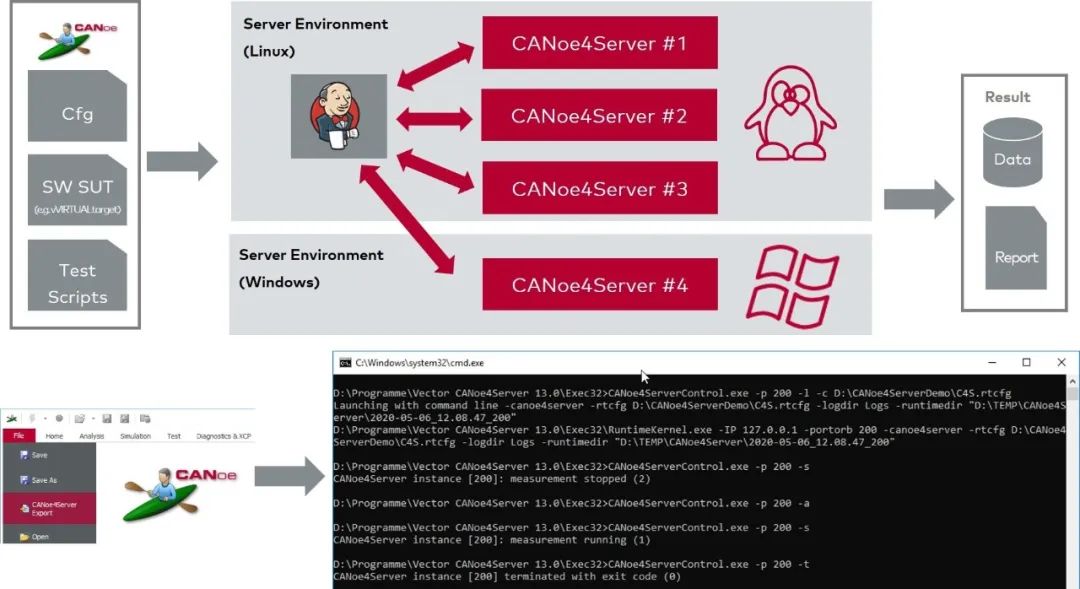
CANoe 13.0版本全新设计Communication Setup窗口的功能:分组被测系统和仿真系统更加便捷,快速跳转到常用的Communication Objects;图形化显示Participants和Endpoints之间的关系,支持在Provider或2个Participants之间勾选配置测量点。数据库支持ARXML、FIBEX、vCDL和vCODM的导入与合并,支持单个或多个文件导入,可通过Model Editor导入带有OEM属性的数据库进行编辑扩展。

全新通信配置界面Communication Setup
Binding中间件通信协议
CANoe 13.0在Communication Objects基础上新增Distributed Objects,采用类似MQTT的Central Broker机制协议:重点关注Participant和其逻辑本身,分析端到端的功能行为而不用关心通信细节。
新增Connectivity服务功能
支持MQTT
CANoe 13.0发布互联服务功能(Connectivity Features Services,CFS),是CANoe面向物联网(Internet of Things,IoT)和消息队列遥测传输协议(Message Queuing Telemetry Transport,MQTT)等互联应用场景开发的仿真和测试功能。其中MQTT是一种基于发布/订阅(Publish/Subscribe)模式的“轻量级”通信协议,用于OTA系统的测试,以及车联网系统中MEC和RSU/TSP之间的通信。CFS支持场景包括:MQTT Broker部署在云端时互联传感器或执行器设备功能仿真与测试;位于本地PC的Broker和CAN与MQTT网关路由。CFS支持证书(PEM或PFX格式证书)的授权(Certificates)访问机制,通过TLS确保Server和Client数据交互的安全。
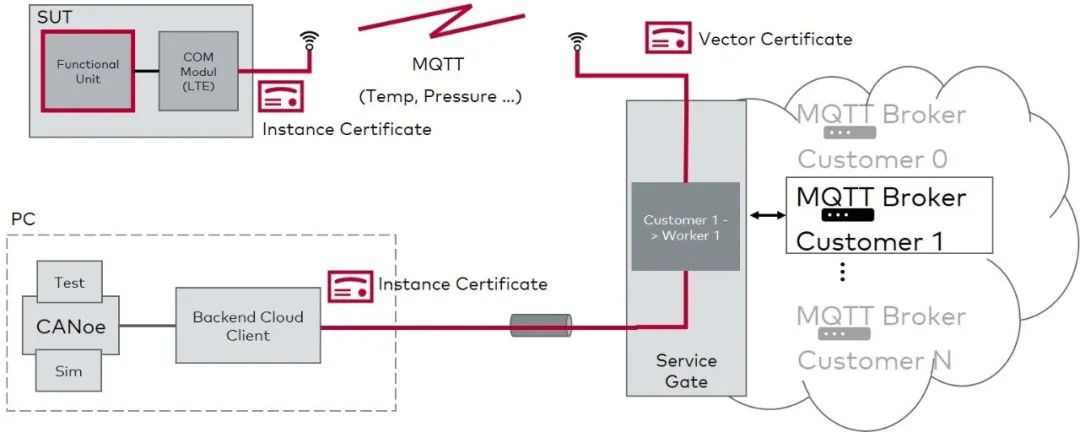
CFS在IoT应用的机制
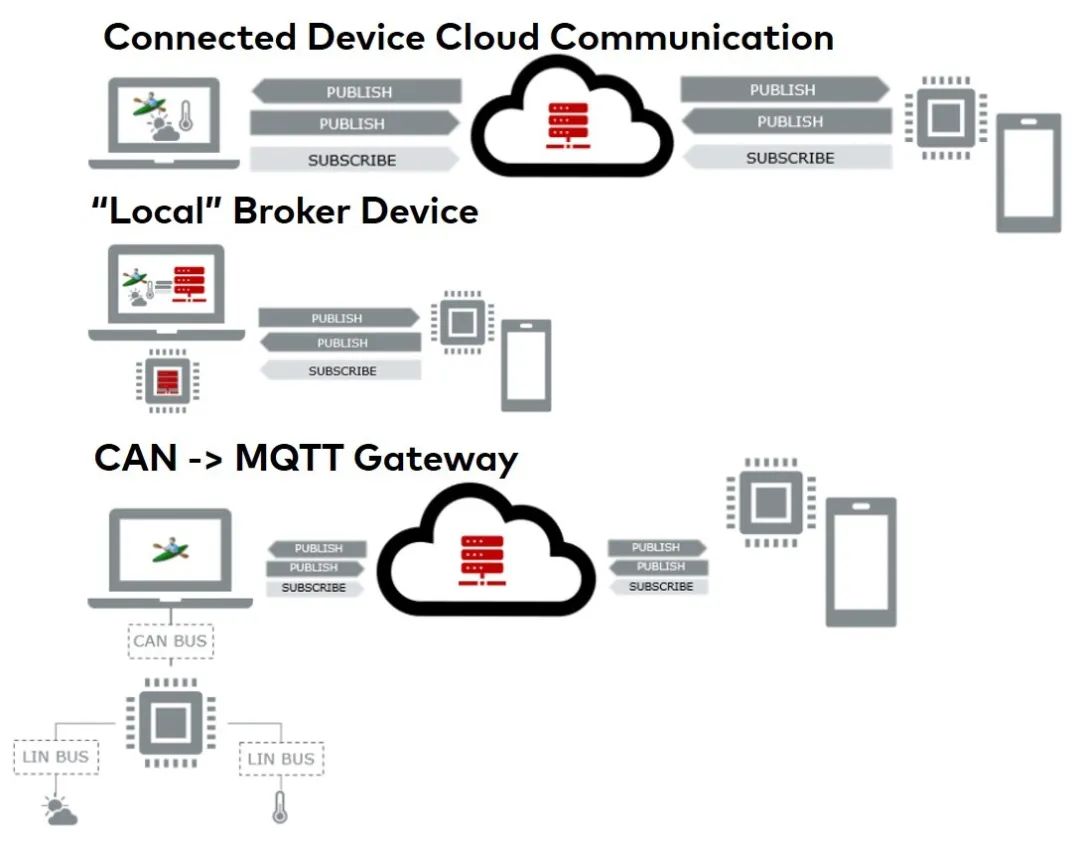
CFS应用场景
新增可选插件
CANoe Option for EtherCAT
CANoe在支持HiL板卡VT System以及通过ASAM XiL API集成第三方HiL台架的基础上,从CANoe 13.0 SP2版本开始集成EtherCAT Slave模块,更好地支持测试过程中VT System无法满足的I/O需求。
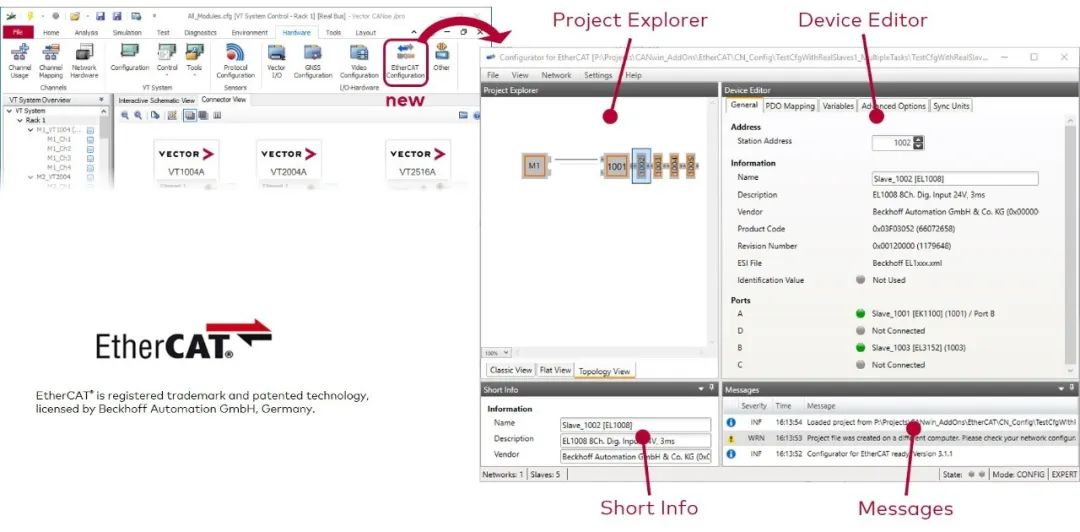
Option for EtherCAT模块配置界面
CANoe Option for EtherCAT支持并行运行2个Master Instance。EtherCAT模块变量的呈现风格与VT System一致,方便用户使用。VT System板卡和EtherCAT模块可以在同一系统中并存,EtherCAT模块时钟与CANoe时钟同步。
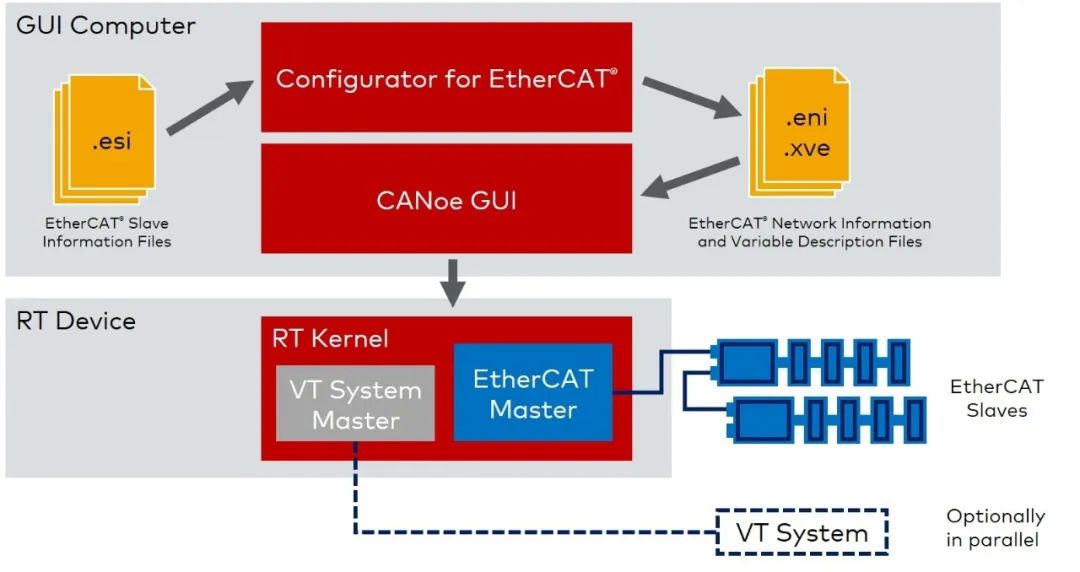
配置和运行机制


点击“阅读原文”了解更多关于CANoe的信息。
我知道你在看哟

