




你是否想过要实现一个Windows程序,可以让它在系统启动的时候自动运行?或者后台运行,不显示界面?或者希望运行的时候能够方便的指定权限?那么Windows服务可以满足你的需求。
本文主要介绍如何用C++编写Windows服务。根据以下三点进行讲解:
Windows服务是如何管理和运行的?
如何实现Windows服务?
如何配置Windows服务?
Windows服务控制管理器
在Widnows Service本地管理可以通过命令行services.msc
打开,可以看到Service的名称,运行状态等,也可以对Service 进行停止
,启动
等操作。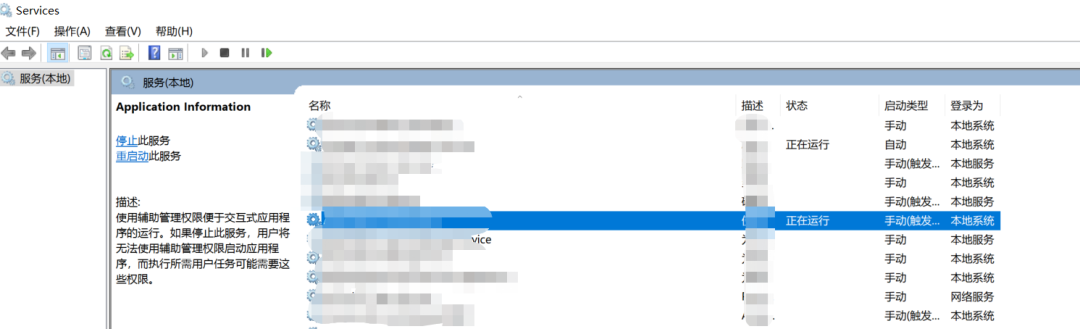
Windows控制服务管理器(Service Control Manager)主要负责统一的管理Windows Service,比如:
记录和维护安全的Service。这些信息会记录在注册表中
HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Services
。当系统启动的时候会按照设定的顺序启动Windows服务,比如服务的
Group Order
和服务的依赖关系我们自己编写的Service进程和SCM主要通过RPC进行交互,比如SCM像我们的Service进程发送
Start
,Stop
等请求;Service程序也会告诉SCM当前Service的状态;对于我们的程序来说不一定关系这个底层实现细节,只需要知道我们调用的Service函数底层是和SCM进行了通信。Service常见的状态如下图所示。(图片来自于微软MSDN Service State Transitions)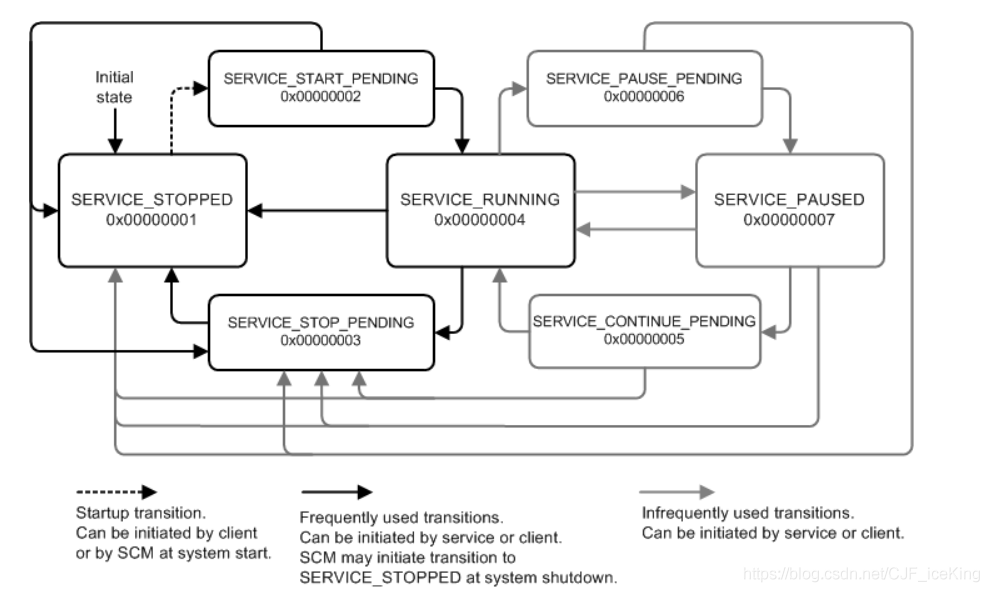
实现Windows服务
接下来我们使用C++来实现一个Windows服务。我们先来看一下实现的结构图: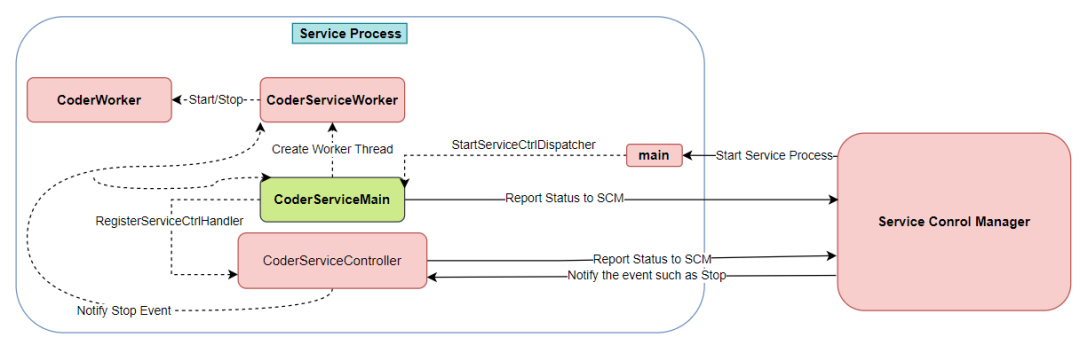
在介绍代码编写之前,我们先定义一个数据结构,实例化一个全局变量,后续会用到,代码里均以加上注释。
struct ServiceContext{ServiceContext() = delete;ServiceContext(std::string strSvcName) : m_strSvcName(strSvcName){;}~ServiceContext(){if (m_hStartedEvent)CloseHandle(m_hStartedEvent);if (m_hStopEvent)CloseHandle(m_hStopEvent);}std::string m_strSvcName;SERVICE_STATUS_HANDLE m_svcStatusHandle = nullptr; //Service Status HandleSERVICE_STATUS m_svcStatus; //Service Name//This event used to check whether service worker is startedHANDLE m_hStartedEvent = CreateEvent(NULL, // default security attributesTRUE, // manual reset eventFALSE, // not signaledNULL); // no name;//This event used to notify service worker to stopHANDLE m_hStopEvent = CreateEvent(NULL, // default security attributesTRUE, // manual reset eventFALSE, // not signaledNULL); // no name;DWORD m_dwHintTimeout = 5 * 1000; // 5 seconds, check interval for starting and stoppingDWORD m_dwCheckPoint = 1; // It's used to co-work check for starting and stopping};ServiceContext gCoderSvcCtx("CoderService");
第一步
当用户在服务管理器中启动
Service的时候,Service Control Manager(后面简称SCM
), 将会创建我们编写的服务进程。此时进程会调用main
。
StartServiceCtrlDispatcher
在main
函数启动后,尽量快速调用,否则一段时间后,SCM会认为程序hang住了,而关闭掉Service进程。StartServiceCtrlDispatcher
, 注册我们的Service: Service名称为CoderService
, Service对应的启动函数是CoderServiceMain
。StartServiceCtrlDispatcher
一般当Service设置为停止
状态的时候,才会退出。当然这里的停止包括: Service进程终止; Service接收到停止
指令,后设置Stop状态等等。通过代码不难发现,一个服务程序可以注册多个Service,不过本文主要讲解单独Service实现。
int main(){SERVICE_TABLE_ENTRY svcTableEntry[] = {{const_cast<char *>(gCoderSvcCtx.m_strSvcName.c_str()), CoderServiceMain},{NULL, NULL}};//It should be invoked in main as soon as possible//Start failed, you can use GetLastError() to get the error codeif (!StartServiceCtrlDispatcher(svcTableEntry))return -1;return 0;}
第二步
CoderServiceMain
是对应Service CoderWorker
的回调程序入口。
注册了
CoderServiceController
作为Event处理回调函数,比如用户停止
服务。SERVICE_WIN32_OWN_PROCESS
设置服务为独占程序的服务,即非
多个Sevice共享服务程序。设置服务进入状态
SERVICE_START_PENDING
, 通知SCM调用
StartCoderServiceWorker
进入下一步启动过程ReportSvcStatus
是SetServiceStatus
的封装,去除重复代码调用
//Refer to: https://docs.microsoft.com/en-us/windows/win32/services/writing-a-servicemain-functionbool ReportSvcStatus(ServiceContext& ctx,DWORD dwCurrentState,DWORD dwWin32ExitCode){// Fill in the SERVICE_STATUS structure.ctx.m_svcStatus.dwCurrentState = dwCurrentState;ctx.m_svcStatus.dwWin32ExitCode = dwWin32ExitCode;ctx.m_svcStatus.dwWaitHint = ctx.m_dwHintTimeout;if (dwCurrentState == SERVICE_START_PENDING)ctx.m_svcStatus.dwControlsAccepted = 0;elsectx.m_svcStatus.dwControlsAccepted = SERVICE_ACCEPT_STOP | SERVICE_ACCEPT_SHUTDOWN;if ((dwCurrentState == SERVICE_RUNNING) ||(dwCurrentState == SERVICE_STOPPED))ctx.m_svcStatus.dwCheckPoint = 0;elsectx.m_svcStatus.dwCheckPoint = ctx.m_dwCheckPoint++;// Report the status of the service to the SCM.return SetServiceStatus(ctx.m_svcStatusHandle, &ctx.m_svcStatus);}//Each Service binding a ServiceMainvoid CoderServiceMain(DWORD dwNumServicesArgs, LPSTR *lpServiceArgVectors){// 1. Register Control HandlergCoderSvcCtx.m_svcStatusHandle = RegisterServiceCtrlHandler(const_cast<char *>(gCoderSvcCtx.m_strSvcName.c_str()),CoderServiceController);if (!gCoderSvcCtx.m_svcStatusHandle)return;// 2. Set SERVICE_START_PENDINGgCoderSvcCtx.m_svcStatus.dwServiceType = SERVICE_WIN32_OWN_PROCESS;gCoderSvcCtx.m_svcStatus.dwServiceSpecificExitCode = 0;if (!ReportSvcStatus(gCoderSvcCtx, SERVICE_START_PENDING, NO_ERROR)){ReportSvcStatus(gCoderSvcCtx, SERVICE_STOPPED, NO_ERROR);return;}// 3. your worker start// Service woker will work for specified task, if it return means it's stoppedStartCoderServiceWorker(dwNumServicesArgs, lpServiceArgVectors);return;}
第三步
StartCoderServiceWorker
这个是Service启动的主要过程
CoderServiceWorker
你可以这样理解:StartCoderServiceWorker
以及之前的部分,主要是为了和SCM进行交互,而CoderServiceWorker
则为你的Service需要执行的内容/工作。大家在实现一些工作/任务的时候都会做一些封装,而这里
CoderWorker
也是对实际执行的内容/工作做了封装。提供了两个接口Start
,Stop
。划重点了,如果你要实现一个windows服务的具体工作,那么只需要在Run函数中做实现即可。当
CoderServiceWorker
的初始化完成后,会触发m_hStartedEvent
,StartCoderServiceWorker
收到这个事件后,会通知SCM状态改为SERVICE_RUNNING
。因为有些程序初始化需要时间比较长,不过一般是不建议初始化时间太长。有的程序员会让程序的Service尽快进入正在运行
状态,异步的去做一些初始化,但这样会导致一个问题,就是服务已经显示正在运行
状态,但其初始化未完成无法提供服务;所以有的程序员会等待初始化完毕后,才通知SCM为正在运行
状态,以为这样保证,服务正在运行
状态就保证了其已经可以正常工作了。这两种方式根据自己的场景进行抉择。而本程序是用sleep
模拟了10秒钟的初始化时间,并且在StartCoderServiceWorker
等待m_hStartedEvent
。如果初始化一直没有完成,那么StartCoderServiceWorker
会间隔m_dwHintTimeout
像SCM发送SERVICE_START_PENDING
。为什么要这么做?因为MSDN上说如果在m_dwHintTimeout
间隔时间后需要更新服务的状态,否则有可能SCM会认为程序已经出错,并且停止服务(但本人实际测试,并不会停止服务,但为了信任微软的文档,此程序还是会及时的发送消息给SCM)。
关于m_hStopEvent
这个和m_hStartedEvent
实现方式类似,主要用于感知我们的服务的工作已经停止了,可以对SCM发送SERVICE_STOPPED
的状态了。这个后续再讲,因为目前说的是Service启动过程。
启动完成后程序将会进入如下状态:
StartCoderServiceWorker
等待m_hStopEvent
事件CoderServiceWorker
在等待m_hStopEvent
事件CoderWorker::Run
循环执行任务,并且查看是否需要停止
class CoderWorker{public:bool Start(){// You should fill your Worker thread init task here// Here just sleep 10 seconds to fake the init timestd::this_thread::sleep_for(std::chrono::seconds(10));//Start the worker process tasksint iTmpPara = 1;m_thWorker = std::thread(&CoderWorker::Run, this, iTmpPara);return true;}void Stop(){m_bStop = true;if (m_thWorker.joinable())m_thWorker.join();// Here we just Fake sleep 10 seconds to stopstd::this_thread::sleep_for(std::chrono::seconds(10));}void Run(int iPara){while (!m_bStop){//do task//Here just fill your code to do your work//just here fake sleep 1 second to do taskstd::this_thread::sleep_for(std::chrono::seconds(1));}}private:std::thread m_thWorker;volatile bool m_bStop = false;};// Here you can also specify other parametersvoid CoderServiceWorker(ServiceContext& ctx, DWORD dwNumServicesArgs, LPSTR *lpServiceArgVectors){// 1. Init and Start worker and notify the it's startedCoderWorker woker{};if (!woker.Start())ExitThread(-1);SetEvent(ctx.m_hStartedEvent);// 2. Wait for the stop eventDWORD dwCode = WaitForSingleObject(ctx.m_hStopEvent, INFINITE);woker.Stop();ExitThread(0);return;}//Service Worker means what your service really dovoid StartCoderServiceWorker(DWORD dwNumServicesArgs, LPSTR *lpServiceArgVectors){// 1. Start your service worker to handle tasksstd::thread thWorker(CoderServiceWorker, std::ref(gCoderSvcCtx), dwNumServicesArgs, lpServiceArgVectors);// 2. Check the starting statuswhile (true){DWORD dwCode = WaitForSingleObject(gCoderSvcCtx.m_hStartedEvent, gCoderSvcCtx.m_dwHintTimeout);if (WAIT_TIMEOUT == dwCode){//Still startingReportSvcStatus(gCoderSvcCtx, SERVICE_START_PENDING, NO_ERROR);}else if (WAIT_OBJECT_0 == dwCode){//Started FinishResetEvent(gCoderSvcCtx.m_hStartedEvent);ReportSvcStatus(gCoderSvcCtx, SERVICE_RUNNING, NO_ERROR);break;}else{//Other errorsReportSvcStatus(gCoderSvcCtx, SERVICE_STOPPED, NO_ERROR);return;}}// 3. Check whether receive stop eventwhile (true){DWORD dwCheckTime = 1000; //1 secondDWORD dwCode = WaitForSingleObject(gCoderSvcCtx.m_hStopEvent, dwCheckTime);if (WAIT_TIMEOUT == dwCode){//Still runiningcontinue;}else if (WAIT_OBJECT_0 == dwCode){//It begin to stop// run into Stop pending statusReportSvcStatus(gCoderSvcCtx, SERVICE_STOP_PENDING, NO_ERROR);break;}else{//Other errorsReportSvcStatus(gCoderSvcCtx, SERVICE_STOPPED, NO_ERROR);return;}}// 4. Check the stopping status// If it's stopped then set the status to STOPHANDLE hThreadHandle = thWorker.native_handle();while (true){DWORD dwCode = WaitForSingleObject(hThreadHandle, gCoderSvcCtx.m_dwHintTimeout);if (WAIT_TIMEOUT == dwCode){//Still stoppingReportSvcStatus(gCoderSvcCtx, SERVICE_STOP_PENDING, NO_ERROR);}else if (WAIT_OBJECT_0 == dwCode){// stop Finish// Reset the stop eventResetEvent(gCoderSvcCtx.m_hStopEvent);ReportSvcStatus(gCoderSvcCtx, SERVICE_STOPPED, NO_ERROR);break;}else{//Other errorsReportSvcStatus(gCoderSvcCtx, SERVICE_STOPPED, NO_ERROR);return;}}return;}
第四步
上面已经描述完成了程序的启动过程,并且服务已经处于正在运行
状态了。那么假设这个时候用户在服务管理器中点击了停止
服务,程序会如何运行呢?
首先还记得
第二步
中提到的CoderServiceController
不?这是个回调函数,收到了SERVICE_CONTROL_STOP
,会先设置服务状态为SERVICE_STOP_PENDING
, 并且设置m_hStopEvent
通知其他线程开始停止工作。CoderServiceWorker
在接受到m_hStopEvent
事件,调用woker.Stop()
设置m_bStop
为true
,此时CoderWorker::Run
,停止工作。这里模拟了10秒钟的stop后释放资源的时间。StartCoderServiceWorker
接收到m_hStopEvent
事件,开始等待CoderServiceWorker
线程停止,并且每隔m_dwHintTimeout
时长给SCM报告SERVICE_STOP_PENDING
。直到CoderServiceWorker
停止,给SCM报告SERVICE_STOPPED
状态。
//Each Service have a Service Controller to control thevoid CoderServiceController(DWORD dwControl){// Handle the requested control code.switch (dwControl){case SERVICE_CONTROL_SHUTDOWN:case SERVICE_CONTROL_STOP:ReportSvcStatus(gCoderSvcCtx, SERVICE_STOP_PENDING, NO_ERROR);// Signal the service to stop.SetEvent(gCoderSvcCtx.m_hStopEvent);return;default:break;}}
服务的配置
上面已经编写了一个Service程序,下面来讲讲如何对我们的服务进行部署和配置。本人知道的大概有两种:
自己在Service程序中实现安装,删除服务的功能,大致是调用
CreateService
这类API。然后通过命令行参数来控制程序启动是创建服务
,删除服务
,还是启动服务
。使用命令
sc
对服务进行操作,本文主要讲sc
命令
安装服务
创建一个服务的命令: sc create CoderWorker binpath=C:\Personal\WindowsServiceNormal.exe type=own start=demand displayname="Coder Woker"
安装一个服务我们最需要注意的是以下几点:
运行程序的账户信息: 这里没有设置,默认是
Local System服务的名字:
CoderWorker
, 这里要注意和我们编写的服务里面的m_strSvcName
服务名字要一致程序的位置:
C:\Personal\WindowsServiceNormal.exe启动的方式:
demand
表示手动。而如果想做成开机启动可以设置为auto
启动服务
sc start CoderWorker
这个命令是不等待服务启动完毕的。如果想等待启动完毕后再返回可以调用net start CoderWorkder
.
查询服务状态
sc query CoderWorker
停止服务
sc stop CoderWorker
这个命令是不等待服务启动完毕的。如果想等待启动完毕后再返回可以调用net stop CoderWorkder
.
删除服务
sc delete CoderWorker
,在调用这个命令之前,最好是先停止服务。
服务崩溃自动重启
这个功能是非常有用的一个功能。大多数的程序员都不敢保证自己写的程序永远都不会崩溃,尤其是C++
程序员。那么当你编写的服务在客户的机器上运行时,如果崩溃后,程序就不再工作了,在有些情况下是不太能够接受的。Windows的服务框架提供了这个功能,只需要在Windows服务中进行配置即可,如下图: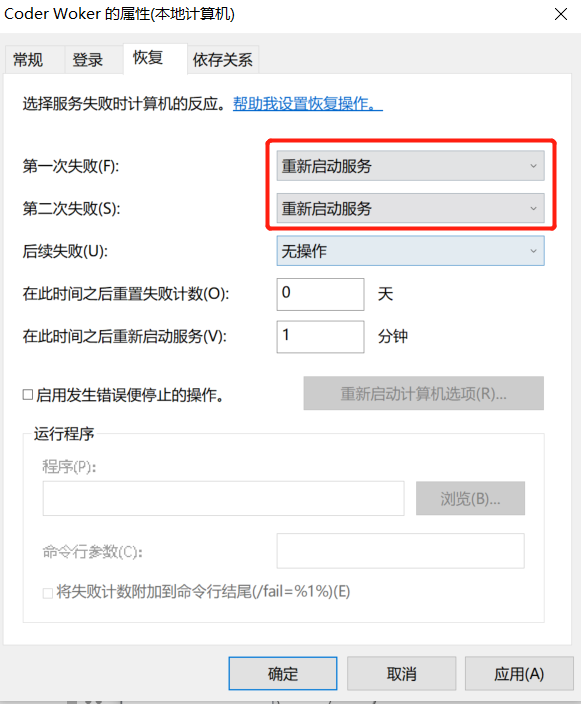
参考
MSDN: Service Control Manager
MSDN: Writing a Service Main
