




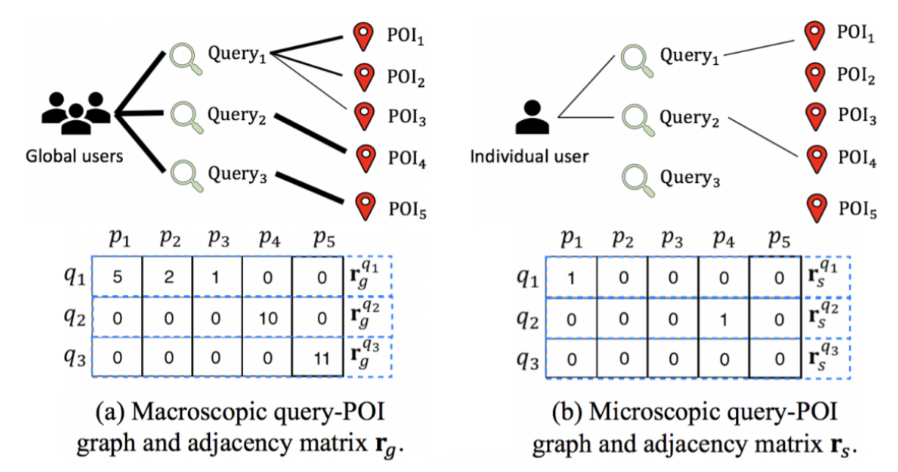
兴趣点(Point-of-Interest, POI)查询是目前地图服务系统与叫车应用中最重要的功能之一。现有的POI查询方法聚焦在比较查询的上下文信息和POI的地理信息之间的静态相似性来返回结果。但是,在实际应用中,由于POI查询具有动态变化的特点,对于不同时空情景下不同用户的相同查询,系统往往不能很好的返回个性化的查询结果。为此,罗格斯大学与百度的研究人员在WWW2021上发表了论文 《Incremental Spatio-Temporal Graph Learning for Online Query-POI Matching》。该论文提出了一种增量的时空图学习框架(IncreSTGL) 用于解决动态场景下的在线POI查询问题。
 表示按时间切分后宏观图的个数,
表示按时间切分后宏观图的个数, 同理。
同理。 与
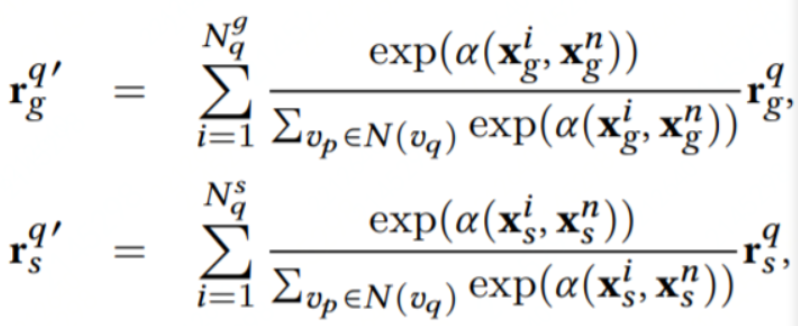
与 分别表示第宏观图与微观图第i个时间片的query节点的特征矩阵。
分别表示第宏观图与微观图第i个时间片的query节点的特征矩阵。 与
与 分别表示宏观图与微观图对应的最新时间片的query节点的特征矩阵。
分别表示宏观图与微观图对应的最新时间片的query节点的特征矩阵。 表示非标准化的注意力权重,定义为:
表示非标准化的注意力权重,定义为: 
 与
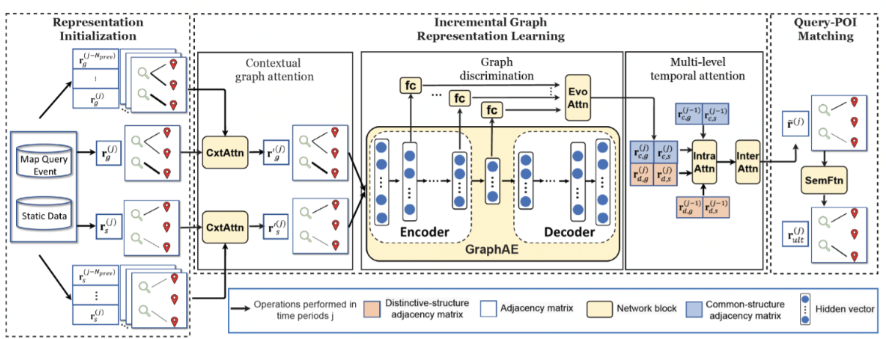
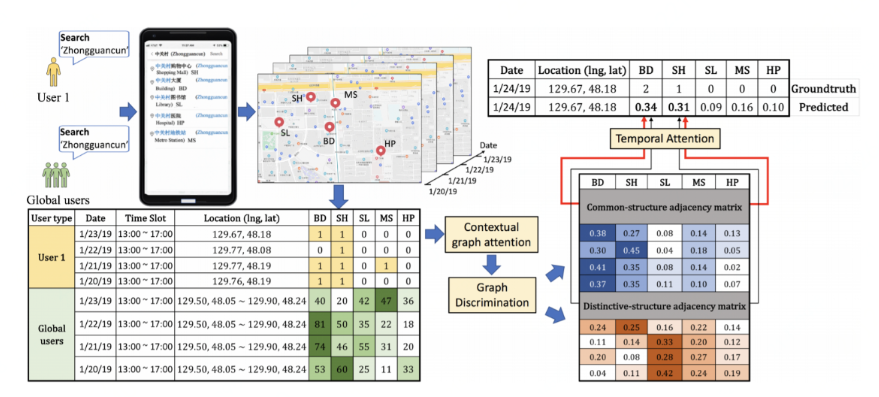
与 微观图, GraphAE通过捕捉动态时变漂移的用户偏好,融合社会效应和个性化偏好。具体来说,图辨别器 渐进地提取两个连续时间段之间一般偏好转移和用户个性化偏好转移的相似性和差异性,并分别将它们嵌入公共结构和不同结构的图邻接矩阵中。如图5所示,对于邻近的两个交互图,GraphAE 能 够基于他们的共有与不同结构通过encoder-decoder框架重构成新的邻接矩阵。值得一提的是, encoder部分中的隐变量通过多层级方式以注意力的方式得到。损失函数为重构误差。对于宏观图 与微观图,分别重构得到公共图与个性图,一共包含四个组合。
微观图, GraphAE通过捕捉动态时变漂移的用户偏好,融合社会效应和个性化偏好。具体来说,图辨别器 渐进地提取两个连续时间段之间一般偏好转移和用户个性化偏好转移的相似性和差异性,并分别将它们嵌入公共结构和不同结构的图邻接矩阵中。如图5所示,对于邻近的两个交互图,GraphAE 能 够基于他们的共有与不同结构通过encoder-decoder框架重构成新的邻接矩阵。值得一提的是, encoder部分中的隐变量通过多层级方式以注意力的方式得到。损失函数为重构误差。对于宏观图 与微观图,分别重构得到公共图与个性图,一共包含四个组合。 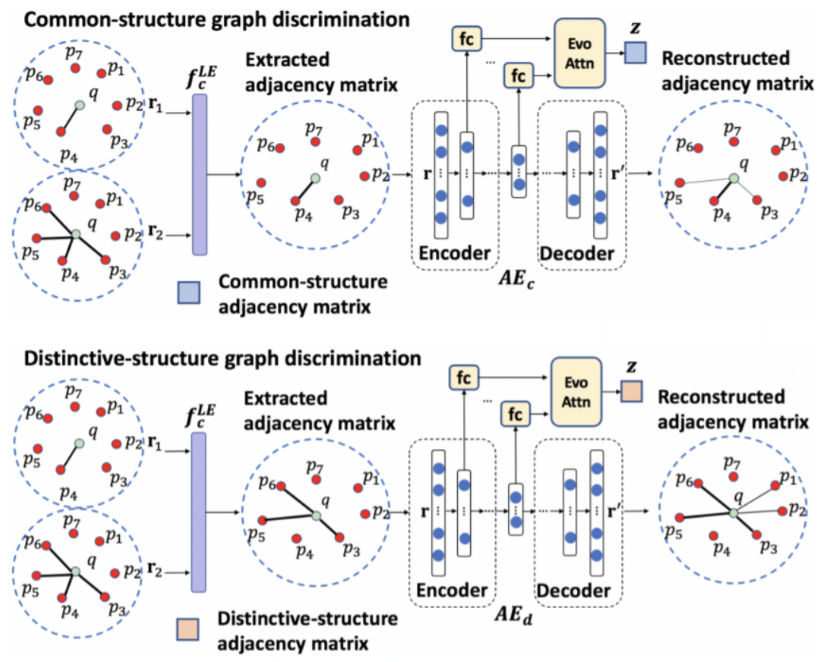
 其中
其中 表示语义匹配图结构,
表示语义匹配图结构, 表示当前更新过后的上下文图结构表示。基于改 图我们可以得到用户当前查询下候选POI的点击概率。 其中
表示当前更新过后的上下文图结构表示。基于改 图我们可以得到用户当前查询下候选POI的点击概率。 其中 表示在最终的图结构中的query q与结果p的边权重。
表示在最终的图结构中的query q与结果p的边权重。 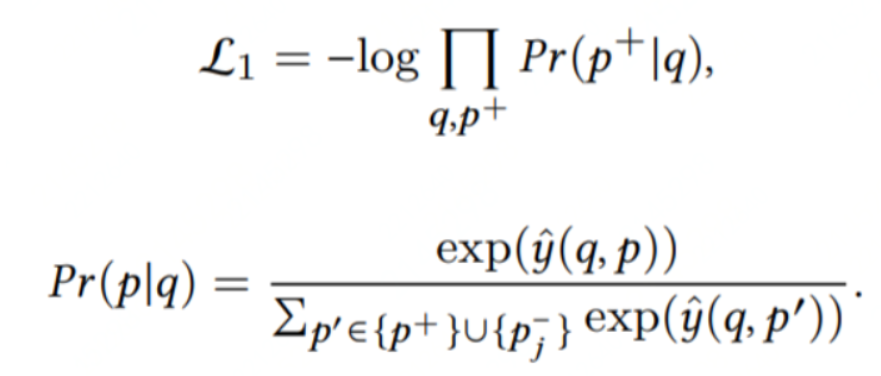
文章转载自时空实验室,如果涉嫌侵权,请发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
