




为结合前面分享过的斯坦福大学提出的pointnet架构实现通过点云对物体实现分类分割,我们决定跑通RGB-D SLAM v2算法获取点云图像,需提前配置好系统的环境:在Ubuntu16.04系统下安装ROS Kinect系统和相关环境。
原项目链接:https://github.com/felixendres/rgbdslam_v2
一、ROS Kinect的安装
1.设置sourece.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > etc/apt/sources.list.d/ros-latest.list'
2.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更新package
sudo apt-get update
4.安装ROS Kinect完整版
sudo apt-get install ros-kinetic-desktop-full
5.初始化rosdep
sudo rosdep init
rosdep update
6.配置ROS环境
echo "source opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7.安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
8.测试是否安装成功
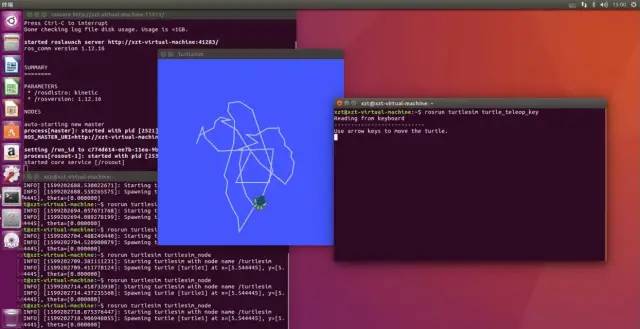
先打开一个终端,输入roscore,上面显示了ros的版本和节点等信息。
再打开一新的个终端,输入rosrun turtlesim turtlesim_node,会出现一个小乌龟窗口。
再打开一个新的终端,输入rosrun turtlesim turtle_teleop_key
此时用方向键可以控制小乌龟的移动,即安装成功。
二、RGBD SLAM V2调用库的配置
1.创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ../
catkin_make
2.下载项目
cd ~/catkin_ws/src
git clone https://github.com/felixendres/rgbdslam_v2
3.安装g2o依赖
sudo apt-get install cmake libeigen3-dev libsuitesparse-dev libqt4-dev qt4-qmake libqglviewer-dev qt5-qmake
4.安装g2o
mkdir build
cd build
cmake ..
make
sudo make install
5.下载pcl1.8并解压,最后不包含中文路径
pcl1.8地址:https://github.com/PointCloudLibrary/pcl/archive/pcl-1.8.0.tar.gz
6.用C++2011编译
gedit CMakeLists.txt
找到第146行(在endif()下面),添加下面一段话
SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
7.编译安装PCL1.8
mkdir build
cd build
cmake ..
make
sudo make install
7.将在项目的cmakelsits文件中的pcl1.7改成1.8
cd ~/catkin_ws/src/rgbdslam_v2
gedit CMakeLists.txt
将79行的 find_package(PCL 1.7 REQUIRED COMPONENTS common io)
改成 find_package(PCL 1.8 REQUIRED COMPONENTS common io)
9.改pcl_rosConfig.cmake文件
sudo gedit opt/ros/kinetic/share/pcl_ros/cmake/pcl_rosConfig.cmake
从119行开始将所有的"/usr/lib/x86_64-linux-gnu/libpcl"字符替换成"/usr/local/lib/libpcl",可以用查找和替换功能实现
10.编译siftgpu
cd ~/catkin_ws/src/rgbdslam_v2/external/SiftGPU
sudo apt-get install libglew-dev
sudo apt-get install libdevil1c2 libdevil-dev
make
11.编译rgbdslam
cd ~/catkin_ws
gedit src/rgbdslam_v2/CMakeLists.txt
最后添加SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
保存退出然后编译
catkin_make
12.测试
在终端输入roscore
打开新终端输入
~/catkin_ws/devel/lib/rgbdslam/rgbdslam
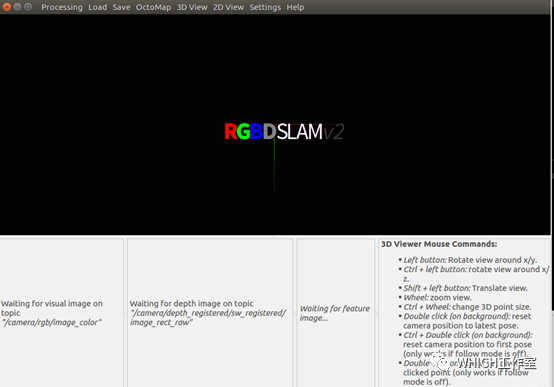
出现以上界面即完成。
