




雷达广泛应用于气象、环境监测、军事方向,雷达数据通常非常的大,如何将雷达数据在Web端进行快速可视化一直是困扰很多技术开发人员的难题,本文选择一环境观测雷达测试原始数据,从0开始阐述如何数据处理和可视化表达。
一 数据说明
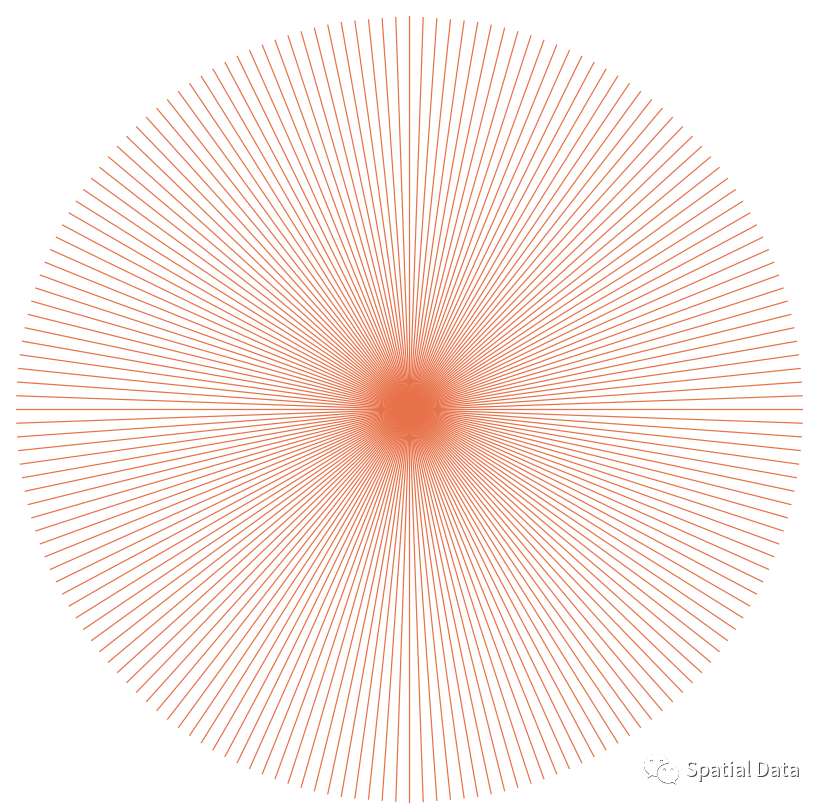
雷达以一点O为圆心,以固定距离R为半径,以正北方向为0°,顺时针每隔若干角度的间隔发射一条射线,从圆心发出的射线,每隔固定距离d获取一个监测值,图示如下:

雷达数据示意图
以实际环境监测雷达数据的PM2.5数据为例,以雷达点为圆心,每隔2°发射一条射线,射线长度为4995米,每条射线上每隔7.5米一个测量值,可以轻易得到以下数据:
每条射线上监测值数量=4995/7.5=666。
射线总数=360/2=180。
雷达一次扫描获取监测数据总数=180*666=119880。
已知带坐标的数据只有雷达所在的圆形点,其他都是描述性数据。
雷达数据具有空间数据少,描述数据多,放射性数据距离圆心越远,数据密度越稀疏,总体数据量还特别大等特点,如果要在web上进行可视化,很多技术人员可能会一头雾水,因为我们常用于Web可视化的空间数据都是点线面等矢量数据,而雷达数据显然与常见矢量非常不同。
为了能在Web端的地图上对雷达数据可视化,起码需要技术人员解决如下几个问题:
如何将描述类数据转换成具体的空间数据表达?
离散性的射线监测数据如何转变成简单的规律数据?
数据量很大如何实现网络快速传输?
数据量大如何实现web端快速可视化并叠加到地图上?
本文将分章节阐述每个问题如何解决。
二 数据空间表达
目前唯一已知一点是雷达站的经纬度点,且已知射线规则,可以暂时用一些代码将雷达扫描圆形区域,射线等描述数据转成实际属性的常用数据,本文作者使用PostGIS快速转换下数据,并可以通过QGIS或者ogr2ogr命令导出为GeoJSON格式备用。
以雷达点为圆心,以4995米为半径,获取雷达圆形区域数据:
select ST_Buffer(ST_GeomFromText('Point(104.255386 30.8904285)', 4326)::geography,4995)::geometry as geom into radar_circle;
由于PostGIS比较强GIS,支持球面等坐标,所以本文严谨的话以球面来缓冲,结果如下:

雷达扫描区域
下一步制作雷达射线,雷达射线是以正北方向为0°,顺时针间隔2°夹角发射射线:
create table radar_line(gid serial primary key,angle int,geom geometry(LineString, 4326));do language plpgsql $$DECLARElon numeric;lat numeric;o geometry;_line geometry;_buffer geometry;_angle numeric;BEGIN --缓冲一个圆o := ST_GeomFromText('Point(104.255386 30.8904285)', 4326);for i in 1..180 loop_angle :=(i -1) * 2;--暂时以5公里为半径,之后裁剪下lon := 104.255386 + 5 111.0 * cos((90-_angle) 180.0 * pi());lat := 30.8904285 + 5 111.0 * sin((90-_angle) 180.0 * pi());_line := ST_MakeLine(o,ST_SetSrid(ST_MakePoint(lon, lat), 4326));insert into radar_line(angle, geom) values (_angle, _line);end loop;end;$$;--使用雷达圆形区域对射线简单裁剪下update radar_line t1 set geom =ST_Intersection(t1.geom,t2.geom)from radar_circle t2;
射线制作结果如下:
雷达扫描射线
射线上根据射线方向,射线起点(圆心),间隔距离是可以算出每个监测点的空间位置的,但计算量实际有点大,所以工程上实际不作如此处理,具体处理可参考下一章节。目前在PostGIS中有了两张表,分别存储了雷达扫描区域和雷达扫描射线,使用QGIS导出为GeoJSON备用。
三 制作格点数据
雷达的监测值是在每个射线上的,但是射线数据在图像表达上不够连续,例如由射线图可知,射线越长,射线间间隔越大,数据越稀疏,如果按照射线渲染,射线边缘间隔会有大量的分叉空白,但实际数据是空间连续的,因此,不能用射线去实际渲染,工程上实际是将射线数据转换成规律的格点数据,本章节简述一下转换原理。
3.1 制作格点
首先根据圆形区域,计算其bbox,由射线上666个监测值,可得到南北,东西方向格点数量皆为666*2=1332,则可以很容易得到每个格点值的坐标:
// 雷达中心点const circle_pt = [104.255386, 30.8904285];// 雷达圆形区域bbox,可以通过postgis或者turf都能快速计算出来const bbox = [104.20988464355469, 30.84493637084961, 104.30088806152344, 30.93592071533203];// 格网分辨率const res_x = (bbox[2] - bbox[0]) 1332;const res_y = (bbox[3] - bbox[1]) / 1332;for (let i = 0; i < 1332; i++) {for (let j = 0; j < 1332; j++) {格点坐标const gridGeom = [bbox[0] + res_x * j,bbox[1] + res_y * i];// 格点序号const gridIndex = j + i * 1332;}}
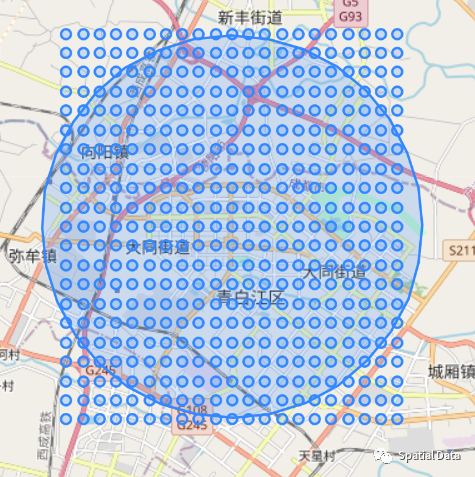
格点生成示意图
3.2 格点赋值
格点坐标获取很容易,格点赋值就稍微麻烦点,这里首先简述下格点赋值原理:

格点赋值说明图
首先,对每一个格点,计算其是否落在圆形区域,不在圆形区域则不计算,减少计算量。
其次,落在圆形区域,则计算圆形到格点的相对正北方向角,每条射线都有其正北方向角,简单计算对比可得到格点与哪条射线最接近,则该格点值从该射线上获取。
最后,获取格点与射线的垂线交点,计算垂足与圆心位置距离l1,射线总长度l2,则可得到垂足在射线上的位置百分比per=l1/l2,由于射线上有666个监测值,共同组成一个数组datas,而监测点分辨率res=1/666,那么可以得到监测值序号再去datas中捞取格点值:
const index = Math.round(per/ res);// 射线监测值数据为数组datasconst gridvalue = datas[index];
逻辑完整代码如下基于NodeJS+Turf做的计算:
// qgis导出的雷达扫射圆形区域json数据const circle = require('./circle.json');// qgis导出的雷达射线json数据const lines = require('./line.json');const point_in_polygon = require('@turf/boolean-point-in-polygon');const turfBearing = require('@turf/bearing');const nearest_point_on_line = require('@turf/nearest-point-on-line');const turfDistance = require('@turf/distance');const xlsx = require('node-xlsx');const fs = require('fs');// 雷达扫射区域bboxconst circle_pt = [104.255386, 30.8904285];const bbox = [104.20988464355469, 30.84493637084961, 104.30088806152344, 30.93592071533203];let lineAngles = new Map();lines.features.forEach(feature => {const length = turfDistance.default(feature.geometry.coordinates[0], feature.geometry.coordinates[1]);feature.properties.length = length;lineAngles.set(feature.properties.angle, feature);});// 解析雷达射线数据let sheetList = xlsx.parse('./radar_county_analysis_data.xlsx');let lineDatas = new Map();const datas = sheetList[0].data;for (let i = 1; i < datas.length; i++) {const angle = parseInt(datas[i][15]);let values = datas[i][17];values = values.split(',');lineDatas.set(angle, values);}async function main() {const res_x = (bbox[2] - bbox[0]) / 1332;const res_y = (bbox[3] - bbox[1]) / 1332;// 测点分辨率const res = 1.0 / 666;// 格点值数组let datas = new Array(1332 * 1332);for (let i = 0; i < 1332; i++) {for (let j = 0; j < 1332; j++) {const gridGeom = [bbox[0] + res_x * j,bbox[1] + res_y * i];const gridIndex = j + i * 1332;// 只有点在圆形区域内才计算if (point_in_polygon.default(gridGeom, circle)) {// 计算夹角let angle = turfBearing.default(circle_pt, gridGeom);//console.log(circle_pt,gridGeom,angle);let mod = angle % 2;if (mod >= 1)angle = angle - mod + 2;elseangle = angle - mod;if (angle < 0)angle = 360 + angle;// 计算线上最近的点const nearest_feature = lineAngles.get(angle);const nearest_pt = nearest_point_on_line.default(nearest_feature, gridGeom);// 最近点距离起点距离,归并到最近点位上const _length = turfDistance.default(circle_pt, nearest_pt);const per = _length / nearest_feature.properties.length;const index = Math.round(per / res);let value = Number(lineDatas.get(angle)[index]);if (!value || value > 20000)continue;datas[gridIndex] = value;}}}
按照该算法,可以得到雷达圆形扫描区域内每个格点的数值,但是当前格点数是1322*1322,这样的一个格点数组JSON格式大约15M,显而易见对网络传输的压力过于大,数据传输是一个大问题。
四 格点转灰度图并可视化
关于格点转灰度图原理和地图叠加显示参考之前的文章:
格点转灰度图
freegiser,公众号:Spatial Data格点数据应用之二 WebGIS等值面可视化篇
转换完灰度图后,原来15M的JSON转换后就160kb,网络传输压力就没有了,并且灰度图是一个归一化过程,前端的WebGL把灰度图作为纹理输入可以很容易进行各种着色处理。本示例使用我司新的基于MapboxGL可视化框架效果如下图:
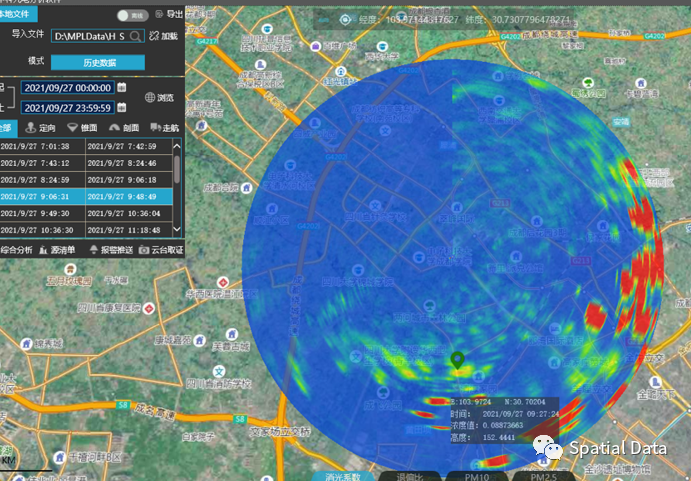
新的可视化框架基于WebGL开发,对格点数据的渲染做了大量符合业务要求的定制,输入一份灰度图数据,前端可以各种变换和动画,选择格网图层做个简单展示示例:
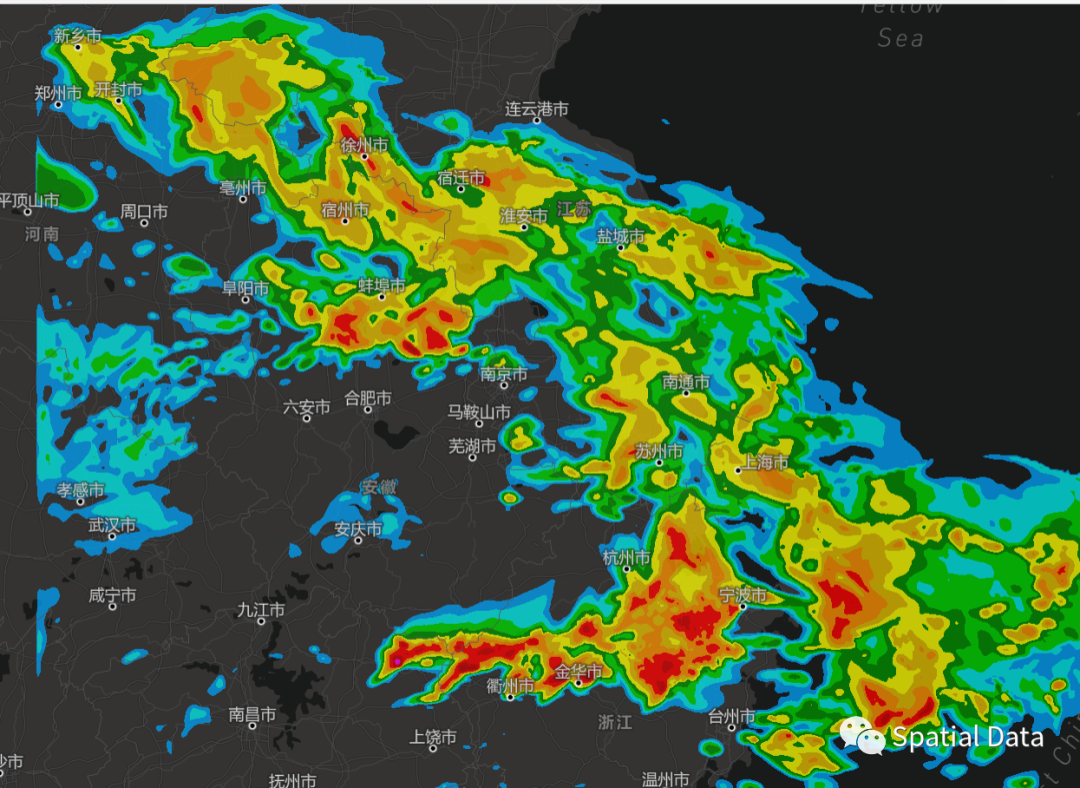
等值面
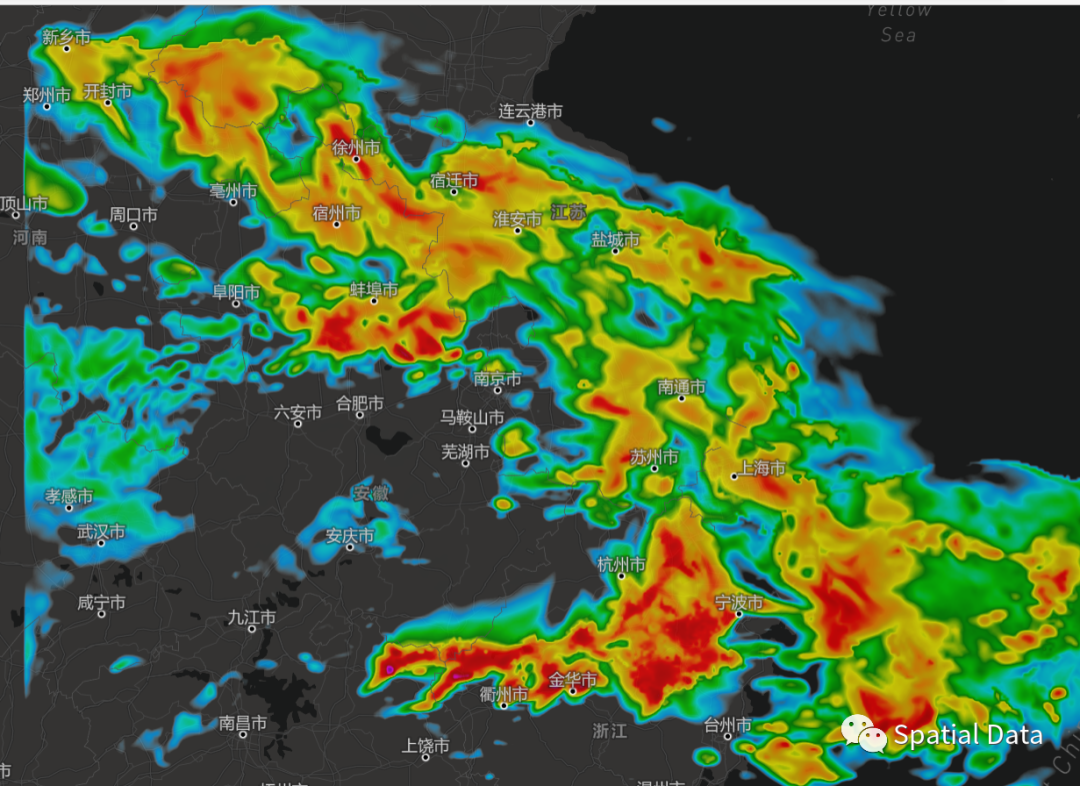
渐变着色
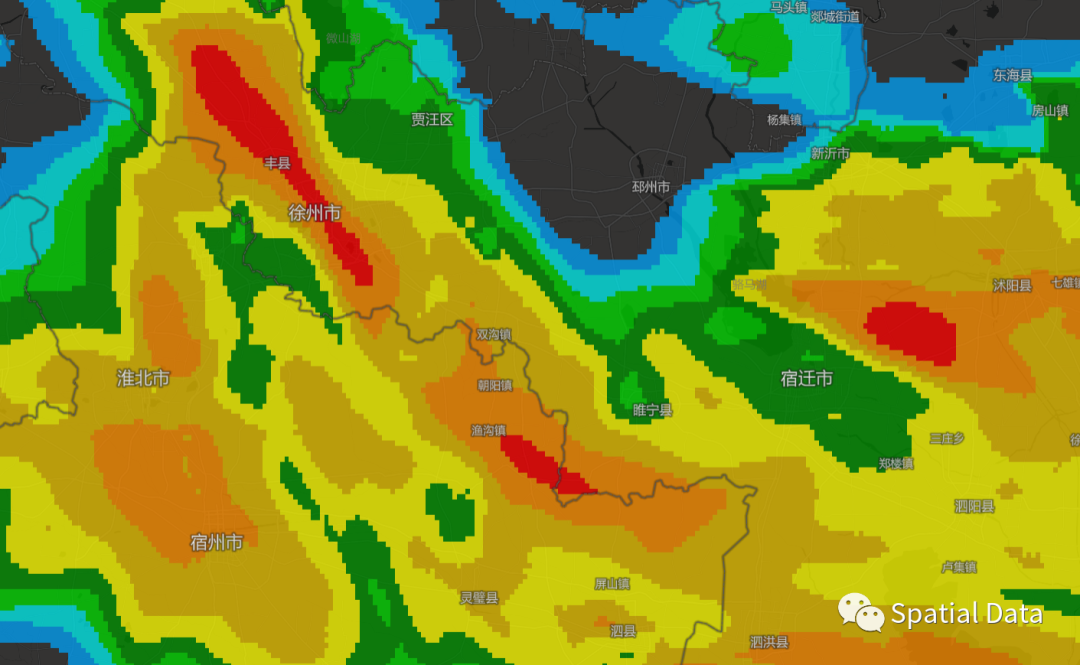
格网着色
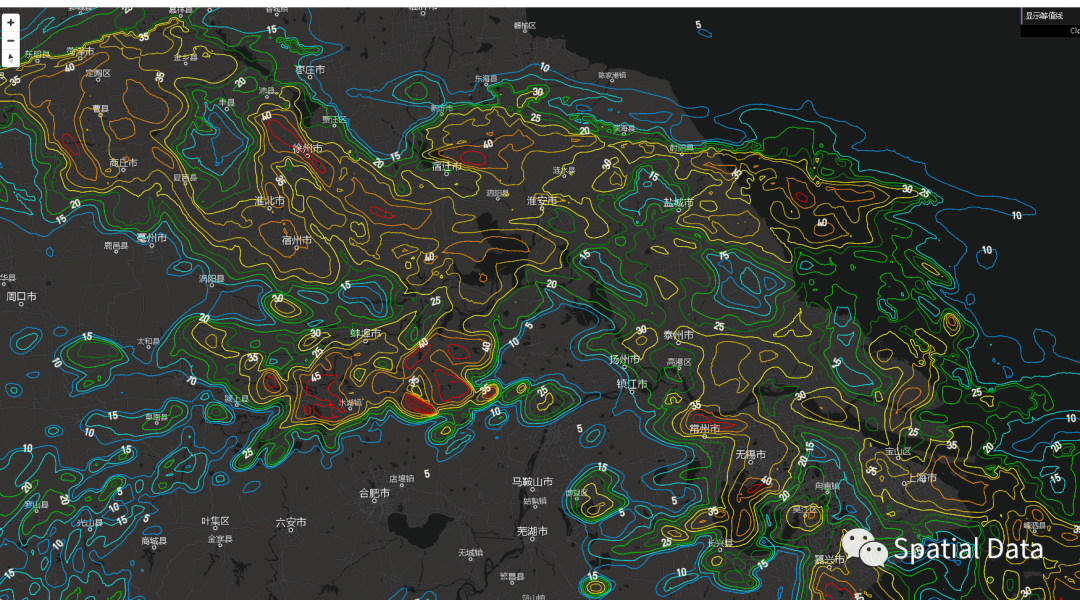
等值线
色值过滤
最后,对开源WebGIS架构感兴趣,尤其是PostGIS、MapboxGL的朋友,可以加入专业QQ群:445307545 进行技术交流和合作。
