最小化函数minimize 函数Rosenbrock 函数优化方法BFGS 算法Nelder-Mead Simplex 算法Powell 算法
最小化函数
minimize 函数
%pylab inline
set_printoptions(precision=3, suppress=True)
plt.rcParams["font.family"] = "SimHei"
plt.rcParams["axes.unicode_minus"] = False
Populating the interactive namespace from numpy and matplotlib
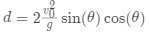
已知斜抛运动的水平飞行距离公式:
水平飞行距离
初速度大小
重力加速度
抛出角度
希望找到使 最大的角度 。
定义距离函数:
def dist(theta, v0):
"""计算以V0(m/s)初速度在θ度发射的弹丸的飞行距离"""
g = 9.8
theta_rad = pi * theta / 180
return 2 * v0**2 / g * sin(theta_rad) * cos(theta_rad)
print("optimal dist:", dist(45, 1.))
optimal dist: 0.1020408163265306
theta = linspace(0, 90, 90)
v0 = 1.2
optimal_dist = dist(45, v0)
print("optimal dist:", optimal_dist)
p = plot(theta, dist(theta, v0))
plt.xlabel(r'抛出角度$\theta (^{\circ})$')
plt.xticks(np.arange(0, 95, 5))
plt.ylabel('水平飞行距离')
plt.hlines(optimal_dist, xmin=35, xmax=55, colors="b")
plt.axvline(45, ymin=0, ymax=1, color="r", ls="--")
plt.show()
optimal dist: 0.14693877551020407
因为 Scipy
提供的是最小化方法,所以最大化距离就相当于最小化距离的负数:
def neg_dist(theta, v0):
return -1 * dist(theta, v0)
导入 scipy.optimize.minimize
:
from scipy.optimize import minimize
result = minimize(neg_dist, x0=50, args=(1, ))
print(f"optimal angle = {result.x[0]:.1f} degrees")
optimal angle = 45.0 degrees
minimize
接受三个参数:第一个是要优化的函数,第二个是初始猜测值,第三个则是优化函数的附加参数,默认 minimize
将优化函数的第一个参数作为优化变量,所以第三个参数输入的附加参数从优化函数的第二个参数开始。
查看返回结果:
print(result)
fun: -0.10204080675612252
hess_inv: array([[8095.275]])
jac: array([-0.])
message: 'Optimization terminated successfully.'
nfev: 27
nit: 3
njev: 9
status: 0
success: True
x: array([44.988])
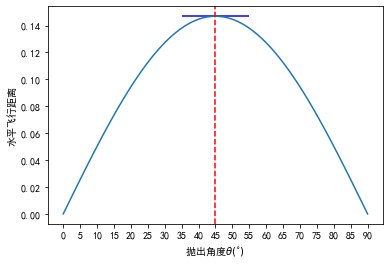
Rosenbrock 函数
Rosenbrock 函数是一个用来测试优化函数效果的一个非凸函数:

导入该函数:
from scipy.optimize import rosen
from mpl_toolkits.mplot3d import Axes3D
使用 N = 2
的 Rosenbrock 函数:
x, y = meshgrid(np.linspace(-2,2,25), np.linspace(-0.5,3.5,25),sparse=True)
# x, y
z = rosen([x,y])
# 图像和最低点 (1,1):
rosen([1,1])
0.0
图像和最低点 (1,1)
:
fig = figure(figsize=(12, 5.5))
ax = fig.gca(projection="3d")
ax.azim = 70
ax.elev = 48
ax.set_xlabel("X")
ax.set_ylabel("Y")
ax.set_zlim((0, 1000))
p = ax.plot_surface(x, y, z, rstride=1, cstride=1, cmap=cm.jet)
# 图像和最低点 (1,1):
rosen_min = ax.plot([1], [1], [0], "ro", zorder=9999, markersize=8)
传入初始值:
x0 = [1.3, 1.6, -0.5, -1.8, 0.8]
result = minimize(rosen, x0)
print(result.x)
[-0.962 0.936 0.881 0.778 0.605]
随机给定初始值:
x0 = np.random.randn(10)
result = minimize(rosen, x0)
print(x0)
print(result.x)
[ 0.374 1.879 -0.407 -0.989 -1.432 1.893 0.339 -0.322 -1.716 -1.614]
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1.]
对于 N > 3
,函数的最小值为  ,不过有一个局部极小值点
,不过有一个局部极小值点  ,所以随机初始值如果选的不好的话,有可能返回的结果是局部极小值点:
,所以随机初始值如果选的不好的话,有可能返回的结果是局部极小值点:
优化方法
BFGS 算法
minimize
函数默认根据问题是否有界或者有约束,使用 'BFGS', 'L-BFGS-B', 'SLSQP'
中的一种。
可以查看帮助来得到更多的信息:
minimize?
默认没有约束时,使用的是 BFGS 方法。
利用 callback
参数查看迭代的历史:
x0 = [-1.5, 4.5]
xi = [x0]
result = minimize(rosen, x0, callback=xi.append)
xi = np.asarray(xi)
print(xi.shape)
print(result.x)
print("in {} function evaluations.".format(result.nfev))
(48, 2)
[1. 1.]
in 252 function evaluations.
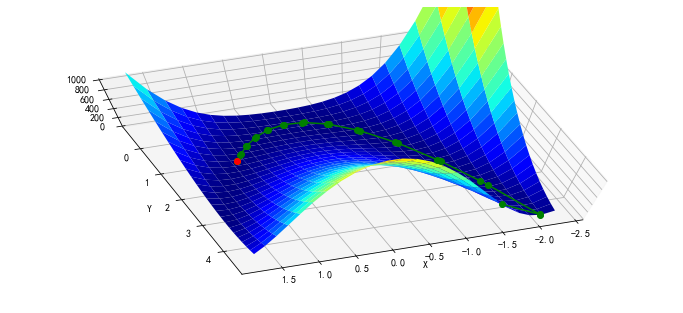
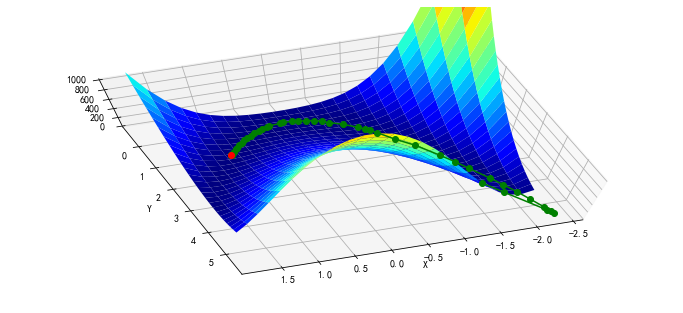
绘图显示轨迹:
x, y = meshgrid(np.linspace(-2.3, 1.75, 25),
np.linspace(-0.5, 4.5, 25),
sparse=True)
z = rosen([x, y])
fig = figure(figsize=(12, 5.5))
ax = fig.gca(projection="3d")
ax.azim = 70
ax.elev = 75
ax.set_xlabel("X")
ax.set_ylabel("Y")
ax.set_zlim((0, 1000))
p = ax.plot_surface(x, y, z, rstride=1, cstride=1, cmap=cm.jet)
intermed = ax.plot(xi[:, 0], xi[:, 1], rosen(xi.T), "g-o", zorder=99)
rosen_min = ax.plot([1], [1], [0], "ro", zorder=100)
BFGS
需要计算函数的 Jacobian 矩阵:
给定 

在我们的例子中
导入 rosen
函数的 Jacobian
函数 rosen_der
:
from scipy.optimize import rosen_der
此时,我们将 Jacobian
矩阵作为参数传入:
x0 = [-1.5, 4.5]
xi = [x0]
result = minimize(rosen, x0, jac=rosen_der, callback=xi.append)
xi = np.asarray(xi)
print(xi.shape)
print(result.x)
print("in {} function evaluations and {} jacobian evaluations.".format(result.nfev, result.njev))
(48, 2)
[1. 1.]
in 62 function evaluations and 62 jacobian evaluations.
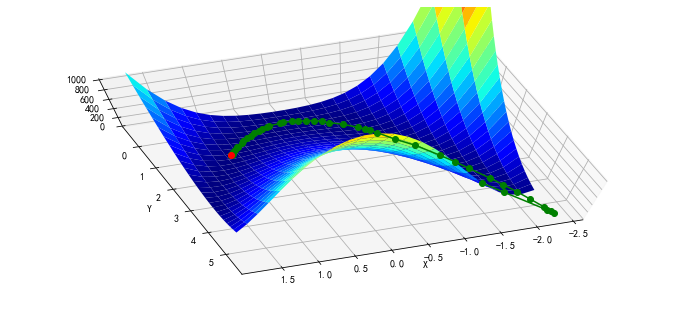
可以看到,函数计算的开销大约减少了一半,迭代路径与上面的基本吻合:
x, y = meshgrid(np.linspace(-2.3,1.75,25), np.linspace(-0.5,4.5,25))
z = rosen([x,y])
fig = figure(figsize=(12,5.5))
ax = fig.gca(projection="3d"); ax.azim = 70; ax.elev = 75
ax.set_xlabel("X"); ax.set_ylabel("Y"); ax.set_zlim((0,1000))
p = ax.plot_surface(x, y, z, rstride=1, cstride=1, cmap=cm.jet)
intermed = ax.plot(xi[:, 0], xi[:, 1], rosen(xi.T), "g-o", zorder=99)
rosen_min = ax.plot([1], [1], [0], "ro", zorder=100)
Nelder-Mead Simplex 算法
改变 minimize
使用的算法,使用 Nelder–Mead 单纯形算法:
x0 = [-1.5, 4.5]
xi = [x0]
result = minimize(rosen, x0, method="nelder-mead", callback = xi.append)
xi = np.asarray(xi)
print(xi.shape)
print("Solved the Nelder-Mead Simplex method with {} function evaluations.".format(result.nfev))
(120, 2)
Solved the Nelder-Mead Simplex method with 226 function evaluations.
x, y = meshgrid(np.linspace(-1.9,1.75,25), np.linspace(-0.5,4.5,25))
z = rosen([x,y])
fig = figure(figsize=(12,5.5))
ax = fig.gca(projection="3d"); ax.azim = 70; ax.elev = 75
ax.set_xlabel("X"); ax.set_ylabel("Y"); ax.set_zlim((0,1000))
p = ax.plot_surface(x,y,z,rstride=1, cstride=1, cmap=cm.jet)
intermed = ax.plot(xi[:,0], xi[:,1], rosen(xi.T), "g-o", zorder=99)
rosen_min = ax.plot([1],[1],[0],"ro", zorder=100)

Powell 算法
使用 Powell 算法
x0 = [-1.5, 4.5]
xi = [x0]
result = minimize(rosen, x0, method="powell", callback=xi.append)
xi = np.asarray(xi)
print(xi.shape)
print("Solved Powell's method with {} function evaluations.".format(result.nfev))
(31, 2)
Solved Powell's method with 855 function evaluations.
x, y = meshgrid(np.linspace(-2.3,1.75,25), np.linspace(-0.5,4.5,25))
z = rosen([x,y])
fig = figure(figsize=(12,5.5))
ax = fig.gca(projection="3d"); ax.azim = 70; ax.elev = 75
ax.set_xlabel("X"); ax.set_ylabel("Y"); ax.set_zlim((0,1000))
p = ax.plot_surface(x,y,z,rstride=1, cstride=1, cmap=cm.jet)
intermed = ax.plot(xi[:,0], xi[:,1], rosen(xi.T), "g-o", zorder=99)
rosen_min = ax.plot([1],[1],[0],"ro", zorder=100)