




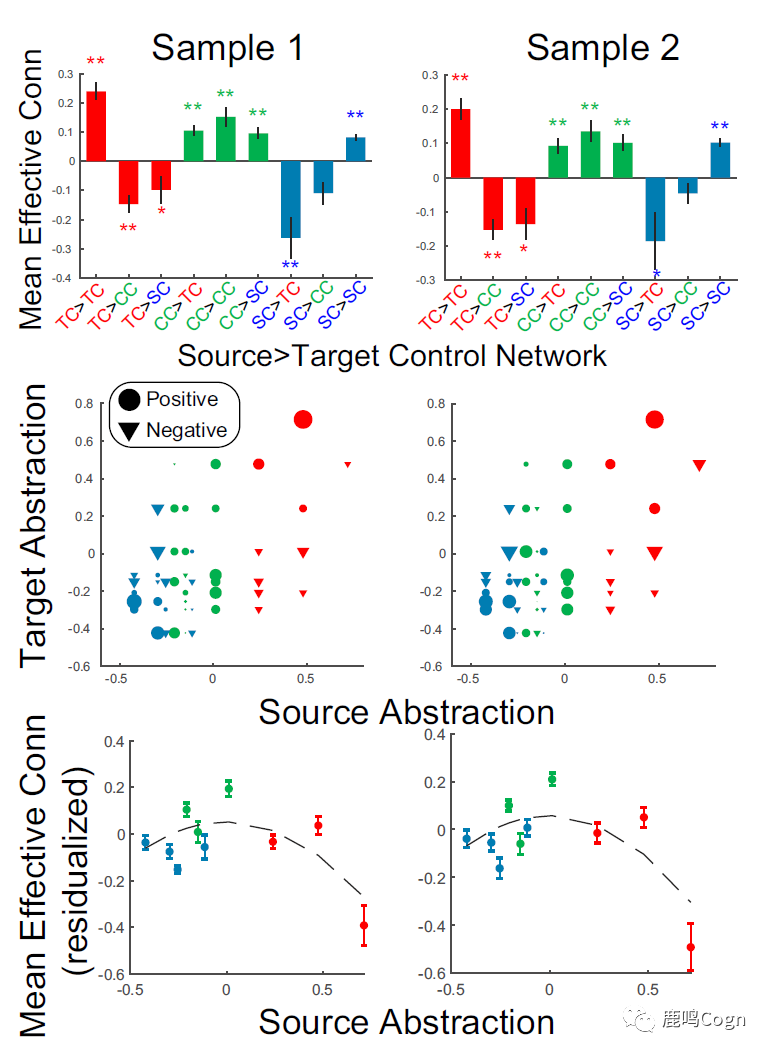
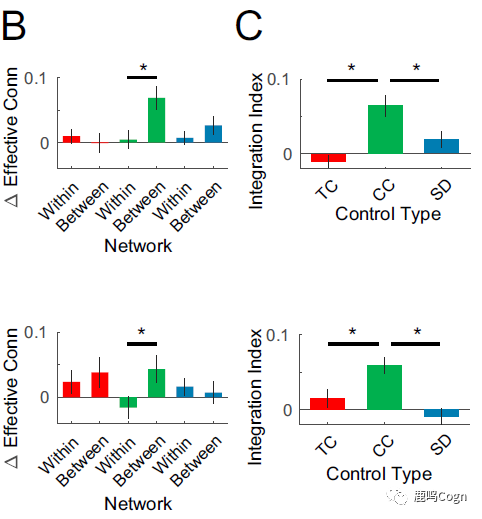
上面是针对各脑区的有效连接分析,为了看控制信号的整合,接下来从网络的层面来探索静态的连接。各脑区按照梯度变化被分配到不同网络中(感觉运动控制/情境控制/时间控制)。如图6(上图)所示,两个样本集中都出现了显著的source x target交互,具体而言,每个网络内的有效连接是最强的;对于感觉运动控制和时间控制网络,它们与其他网络间的有效连接是负向的,这个结果表明这些网络的活动可能抑制了其他网络的活动,从而分离了加工过程。反之,情境控制网络与其他网络间的有效连接是正向相关的,这表明情境网络可以加强其他网络的活动,从而促进整合加工。
文章转载自鹿鸣Cogn,如果涉嫌侵权,请发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
