




本章代码:
https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson6/bn_and_initialize.py https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson6/bn_in_123_dim.py https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson6/normallization_layers.py
这篇文章主要介绍了 Batch Normalization 的概念,以及 PyTorch 中的 1d/2d/3d Batch Normalization 实现。
Batch Normalization
称为批标准化。批是指一批数据,通常为 mini-batch;标准化是处理后的数据服从 的正态分布。
批标准化的优点有如下:
可以使用更大的学习率,加速模型收敛 可以不用精心设计权值初始化 可以不用 dropout 或者较小的 dropout 可以不用 L2 或者较小的 weight decay 可以不用 LRN (local response normalization)
假设输入的 mini-batch 数据是 ,Batch Normalization 的可学习参数是 ,步骤如下:
求 mini-batch 的均值: 求 mini-batch 的方差: 标准化:,其中 是防止分母为 0 的一个数 affine transform(缩放和平移):,这个操作可以增强模型的 capacity,也就是让模型自己判断是否要对数据进行标准化,进行多大程度的标准化。如果 ,,那么就实现了恒等映射。
Batch Normalization 的提出主要是为了解决 Internal Covariate Shift (ICS)。在训练过程中,数据需要经过多层的网络,如果数据在前向传播的过程中,尺度发生了变化,可能会导致梯度爆炸或者梯度消失,从而导致模型难以收敛。
Batch Normalization 层一般在激活函数前一层。
下面的代码打印一个网络的每个网络层的输出,在没有进行初始化时,数据尺度越来越小。
import torch
import numpy as np
import torch.nn as nn
from common_tools import set_seed
set_seed(1) # 设置随机种子
class MLP(nn.Module):
def __init__(self, neural_num, layers=100):
super(MLP, self).__init__()
self.linears = nn.ModuleList([nn.Linear(neural_num, neural_num, bias=False) for i in range(layers)])
self.bns = nn.ModuleList([nn.BatchNorm1d(neural_num) for i in range(layers)])
self.neural_num = neural_num
def forward(self, x):
for (i, linear), bn in zip(enumerate(self.linears), self.bns):
x = linear(x)
# x = bn(x)
x = torch.relu(x)
if torch.isnan(x.std()):
print("output is nan in {} layers".format(i))
break
print("layers:{}, std:{}".format(i, x.std().item()))
return x
def initialize(self):
for m in self.modules():
if isinstance(m, nn.Linear):
# method 1
# nn.init.normal_(m.weight.data, std=1) # normal: mean=0, std=1
# method 2 kaiming
nn.init.kaiming_normal_(m.weight.data)
neural_nums = 256
layer_nums = 100
batch_size = 16
net = MLP(neural_nums, layer_nums)
# net.initialize()
inputs = torch.randn((batch_size, neural_nums)) # normal: mean=0, std=1
output = net(inputs)
print(output)
当使用nn.init.kaiming_normal_()
初始化后,数据的标准差尺度稳定在 [0.6, 0.9]。
当我们不对网络层进行权值初始化,而是在每个激活函数层之前使用 bn 层,查看数据的标准差尺度稳定在 [0.58, 0.59]。因此 Batch Normalization 可以不用精心设计权值初始化。
下面以人民币二分类实验中的 LeNet 为例,添加 bn 层,对比不带 bn 层的网络和带 bn 层的网络的训练过程。
不带 bn 层的网络,并且使用 kaiming 初始化权值,训练过程如下:
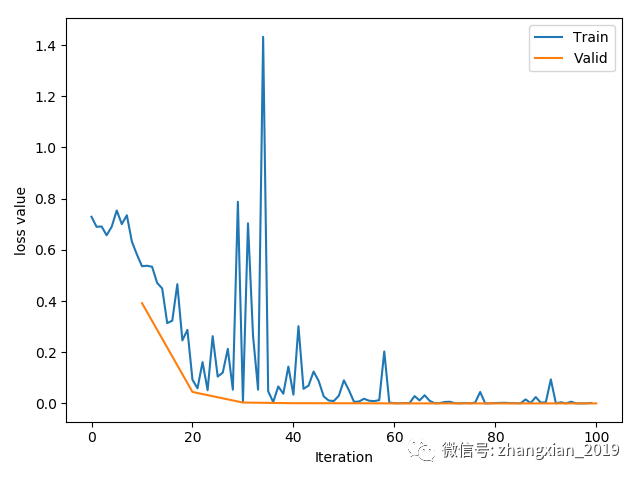
可以看到训练过程中,训练集的 loss 在中间激增到 1.4,不够稳定。
带有 bn 层的 LeNet 定义如下:
class LeNet_bn(nn.Module):
def __init__(self, classes):
super(LeNet_bn, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.bn1 = nn.BatchNorm2d(num_features=6)
self.conv2 = nn.Conv2d(6, 16, 5)
self.bn2 = nn.BatchNorm2d(num_features=16)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.bn3 = nn.BatchNorm1d(num_features=120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, classes)
def forward(self, x):
out = self.conv1(x)
out = self.bn1(out)
out = F.relu(out)
out = F.max_pool2d(out, 2)
out = self.conv2(out)
out = self.bn2(out)
out = F.relu(out)
out = F.max_pool2d(out, 2)
out = out.view(out.size(0), -1)
out = self.fc1(out)
out = self.bn3(out)
out = F.relu(out)
out = F.relu(self.fc2(out))
out = self.fc3(out)
return out
带 bn 层的网络,并且不使用 kaiming 初始化权值,训练过程如下:
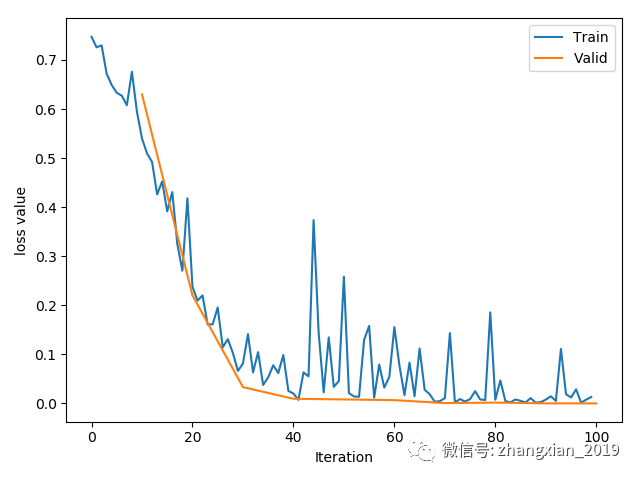
虽然训练过程中,训练集的 loss 也有激增,但只是增加到 0.4,非常稳定。
Batch Normalization in PyTorch
在 PyTorch 中,有 3 个 Batch Normalization 类
nn.BatchNorm1d(),输入数据的形状是 nn.BatchNorm2d(),输入数据的形状是 nn.BatchNorm3d(),输入数据的形状是
以nn.BatchNorm1d()
为例,如下:
torch.nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
参数:
num_features:一个样本的特征数量,这个参数最重要 eps:在进行标准化操作时的分布修正项 momentum:指数加权平均估计当前的均值和方差 affine:是否需要 affine transform,默认为 True track_running_stats:True 为训练状态,此时均值和方差会根据每个 mini-batch 改变。False 为测试状态,此时均值和方差会固定
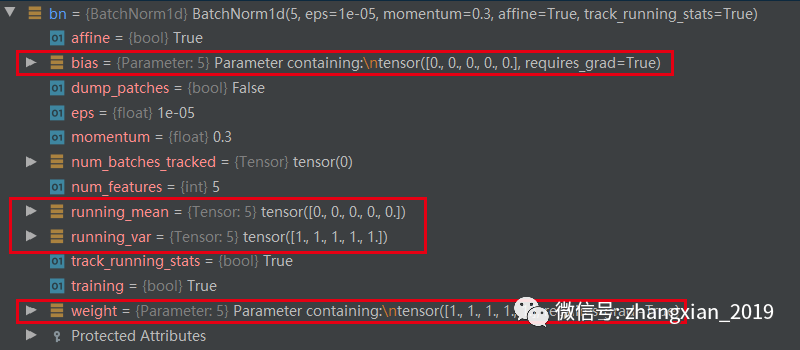
主要属性:
runninng_mean:均值 running_var:方差 weight:affine transform 中的 bias:affine transform 中的
在训练时,均值和方差采用指数加权平均计算,也就是不仅考虑当前 mini-batch 的值均值和方差还考虑前面的 mini-batch 的均值和方差。
在训练时,均值方差固定为当前统计值。
所有的 bn 层都是根据特征维度计算上面 4 个属性,详情看下面例子。
nn.BatchNorm1d()
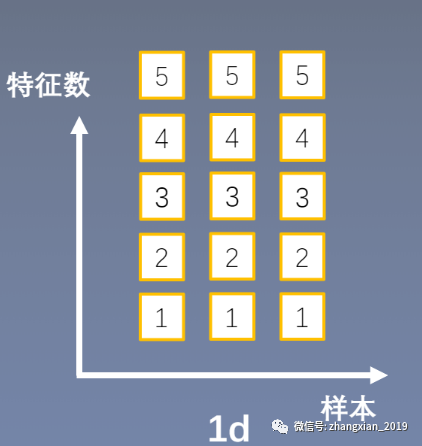
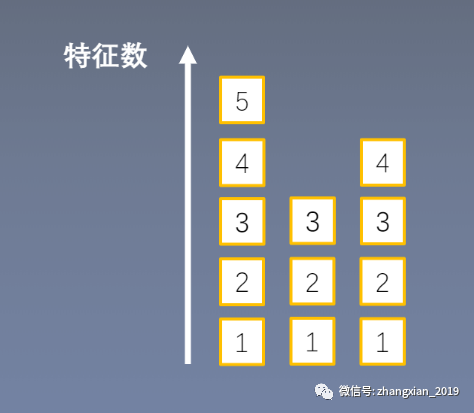
输入数据的形状是 。在下面的例子中,数据的维度是:(3, 5, 1),表示一个 mini-batch 有 3 个样本,每个样本有 5 个特征,每个特征的维度是 1。那么就会计算 5 个均值和方差,分别对应每个特征维度。momentum 设置为 0.3,第一次的均值和方差默认为 0 和 1。输入两次 mini-batch 的数据。
数据如下图:
代码如下所示:
batch_size = 3
num_features = 5
momentum = 0.3
features_shape = (1)
feature_map = torch.ones(features_shape) # 1D
feature_maps = torch.stack([feature_map*(i+1) for i in range(num_features)], dim=0) # 2D
feature_maps_bs = torch.stack([feature_maps for i in range(batch_size)], dim=0) # 3D
print("input data:\n{} shape is {}".format(feature_maps_bs, feature_maps_bs.shape))
bn = nn.BatchNorm1d(num_features=num_features, momentum=momentum)
running_mean, running_var = 0, 1
mean_t, var_t = 2, 0
for i in range(2):
outputs = bn(feature_maps_bs)
print("\niteration:{}, running mean: {} ".format(i, bn.running_mean))
print("iteration:{}, running var:{} ".format(i, bn.running_var))
running_mean = (1 - momentum) * running_mean + momentum * mean_t
running_var = (1 - momentum) * running_var + momentum * var_t
print("iteration:{}, 第二个特征的running mean: {} ".format(i, running_mean))
print("iteration:{}, 第二个特征的running var:{}".format(i, running_var))
输出为:
input data:
tensor([[[1.],
[2.],
[3.],
[4.],
[5.]],
[[1.],
[2.],
[3.],
[4.],
[5.]],
[[1.],
[2.],
[3.],
[4.],
[5.]]]) shape is torch.Size([3, 5, 1])
iteration:0, running mean: tensor([0.3000, 0.6000, 0.9000, 1.2000, 1.5000])
iteration:0, running var:tensor([0.7000, 0.7000, 0.7000, 0.7000, 0.7000])
iteration:0, 第二个特征的running mean: 0.6
iteration:0, 第二个特征的running var:0.7
iteration:1, running mean: tensor([0.5100, 1.0200, 1.5300, 2.0400, 2.5500])
iteration:1, running var:tensor([0.4900, 0.4900, 0.4900, 0.4900, 0.4900])
iteration:1, 第二个特征的running mean: 1.02
iteration:1, 第二个特征的running var:0.48999999999999994
虽然两个 mini-batch 的数据是一样的,但是 bn 层的均值和方差却不一样。以第二个特征的均值计算为例,值都是 2。
第一次 bn 层的均值计算: 第二次 bn 层的均值计算:
网络还没进行前向传播之前,断点查看 bn 层的属性如下:
## nn.BatchNorm2d()
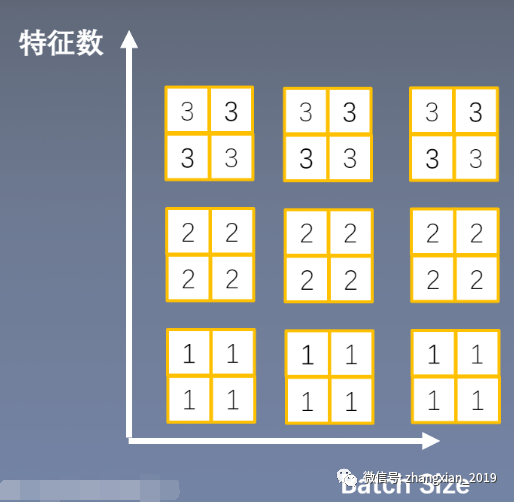
输入数据的形状是 。在下面的例子中,数据的维度是:(3, 3, 2, 2),表示一个 mini-batch 有 3 个样本,每个样本有 3 个特征,每个特征的维度是 。那么就会计算 3 个均值和方差,分别对应每个特征维度。momentum 设置为 0.3,第一次的均值和方差默认为 0 和 1。输入两次 mini-batch 的数据。
数据如下图:
代码如下:
batch_size = 3
num_features = 3
momentum = 0.3
features_shape = (2, 2)
feature_map = torch.ones(features_shape) # 2D
feature_maps = torch.stack([feature_map*(i+1) for i in range(num_features)], dim=0) # 3D
feature_maps_bs = torch.stack([feature_maps for i in range(batch_size)], dim=0) # 4D
# print("input data:\n{} shape is {}".format(feature_maps_bs, feature_maps_bs.shape))
bn = nn.BatchNorm2d(num_features=num_features, momentum=momentum)
running_mean, running_var = 0, 1
for i in range(2):
outputs = bn(feature_maps_bs)
print("\niter:{}, running_mean: {}".format(i, bn.running_mean))
print("iter:{}, running_var: {}".format(i, bn.running_var))
print("iter:{}, weight: {}".format(i, bn.weight.data.numpy()))
print("iter:{}, bias: {}".format(i, bn.bias.data.numpy()))
输出如下:
iter:0, running_mean: tensor([0.3000, 0.6000, 0.9000])
iter:0, running_var: tensor([0.7000, 0.7000, 0.7000])
iter:0, weight: [1. 1. 1.]
iter:0, bias: [0. 0. 0.]
iter:1, running_mean: tensor([0.5100, 1.0200, 1.5300])
iter:1, running_var: tensor([0.4900, 0.4900, 0.4900])
iter:1, weight: [1. 1. 1.]
iter:1, bias: [0. 0. 0.]
nn.BatchNorm3d()
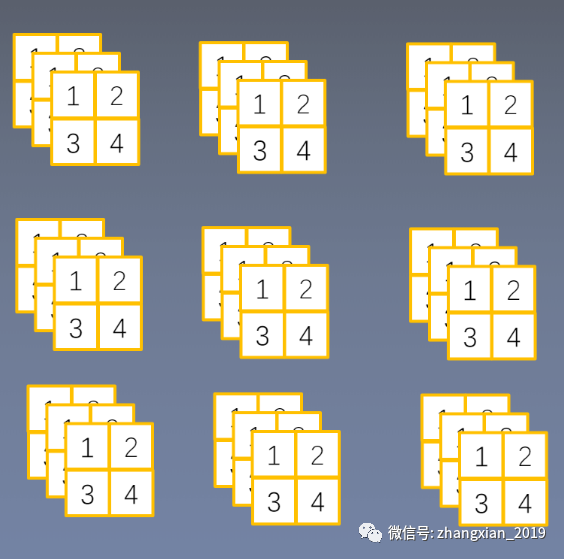
输入数据的形状是 。在下面的例子中,数据的维度是:(3, 2, 2, 2, 3),表示一个 mini-batch 有 3 个样本,每个样本有 2 个特征,每个特征的维度是 。那么就会计算 2 个均值和方差,分别对应每个特征维度。momentum 设置为 0.3,第一次的均值和方差默认为 0 和 1。输入两次 mini-batch 的数据。
数据如下图:
代码如下:
batch_size = 3
num_features = 3
momentum = 0.3
features_shape = (2, 2, 3)
feature = torch.ones(features_shape) # 3D
feature_map = torch.stack([feature * (i + 1) for i in range(num_features)], dim=0) # 4D
feature_maps = torch.stack([feature_map for i in range(batch_size)], dim=0) # 5D
# print("input data:\n{} shape is {}".format(feature_maps, feature_maps.shape))
bn = nn.BatchNorm3d(num_features=num_features, momentum=momentum)
running_mean, running_var = 0, 1
for i in range(2):
outputs = bn(feature_maps)
print("\niter:{}, running_mean.shape: {}".format(i, bn.running_mean.shape))
print("iter:{}, running_var.shape: {}".format(i, bn.running_var.shape))
print("iter:{}, weight.shape: {}".format(i, bn.weight.shape))
print("iter:{}, bias.shape: {}".format(i, bn.bias.shape))
输出如下:
iter:0, running_mean.shape: torch.Size([3])
iter:0, running_var.shape: torch.Size([3])
iter:0, weight.shape: torch.Size([3])
iter:0, bias.shape: torch.Size([3])
iter:1, running_mean.shape: torch.Size([3])
iter:1, running_var.shape: torch.Size([3])
iter:1, weight.shape: torch.Size([3])
iter:1, bias.shape: torch.Size([3])
Layer Normalization
提出的原因:Batch Normalization 不适用于变长的网络,如 RNN
思路:每个网络层计算均值和方差
注意事项:
不再有 running_mean 和 running_var 和 为逐样本的
``` torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True) ```
参数:
normalized_shape:该层特征的形状,可以取 、、 eps:标准化时的分母修正项 elementwise_affine:是否需要逐个样本 affine transform
下面代码中,输入数据的形状是 ,(8, 2, 3, 4),表示一个 mini-batch 有 8 个样本,每个样本有 2 个特征,每个特征的维度是 。那么就会计算 8 个均值和方差,分别对应每个样本。
batch_size = 8
num_features = 2
features_shape = (3, 4)
feature_map = torch.ones(features_shape) # 2D
feature_maps = torch.stack([feature_map * (i + 1) for i in range(num_features)], dim=0) # 3D
feature_maps_bs = torch.stack([feature_maps for i in range(batch_size)], dim=0) # 4D
# feature_maps_bs shape is [8, 6, 3, 4], B * C * H * W
# ln = nn.LayerNorm(feature_maps_bs.size()[1:], elementwise_affine=True)
# ln = nn.LayerNorm(feature_maps_bs.size()[1:], elementwise_affine=False)
# ln = nn.LayerNorm([6, 3, 4])
ln = nn.LayerNorm([2, 3, 4])
output = ln(feature_maps_bs)
print("Layer Normalization")
print(ln.weight.shape)
print(feature_maps_bs[0, ...])
print(output[0, ...])
Layer Normalization
torch.Size([2, 3, 4])
tensor([[[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.]],
[[2., 2., 2., 2.],
[2., 2., 2., 2.],
[2., 2., 2., 2.]]])
tensor([[[-1.0000, -1.0000, -1.0000, -1.0000],
[-1.0000, -1.0000, -1.0000, -1.0000],
[-1.0000, -1.0000, -1.0000, -1.0000]],
[[ 1.0000, 1.0000, 1.0000, 1.0000],
[ 1.0000, 1.0000, 1.0000, 1.0000],
[ 1.0000, 1.0000, 1.0000, 1.0000]]], grad_fn=<SelectBackward>)
Layer Normalization 可以设置 normalized_shape 为 (3, 4) 或者 (4)。
Instance Normalization
提出的原因:Batch Normalization 不适用于图像生成。因为在一个 mini-batch 中的图像有不同的风格,不能把这个 batch 里的数据都看作是同一类取标准化。
思路:逐个 instance 的 channel 计算均值和方差。也就是每个 feature map 计算一个均值和方差。
包括 InstanceNorm1d、InstanceNorm2d、InstanceNorm3d。
以InstanceNorm1d
为例,定义如下:
torch.nn.InstanceNorm1d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
参数:
num_features:一个样本的特征数,这个参数最重要 eps:分母修正项 momentum:指数加权平均估计当前的的均值和方差 affine:是否需要 affine transform track_running_stats:True 为训练状态,此时均值和方差会根据每个 mini-batch 改变。False 为测试状态,此时均值和方差会固定
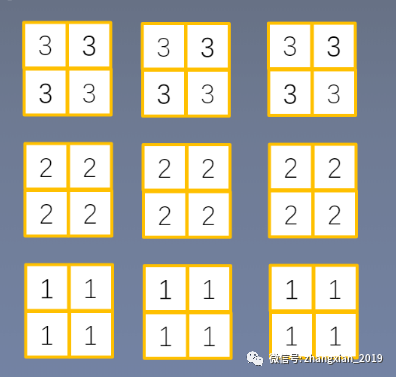
下面代码中,输入数据的形状是 ,(3, 3, 2, 2),表示一个 mini-batch 有 3 个样本,每个样本有 3 个特征,每个特征的维度是 。那么就会计算 个均值和方差,分别对应每个样本的每个特征。如下图所示:
下面是代码:
batch_size = 3
num_features = 3
momentum = 0.3
features_shape = (2, 2)
feature_map = torch.ones(features_shape) # 2D
feature_maps = torch.stack([feature_map * (i + 1) for i in range(num_features)], dim=0) # 3D
feature_maps_bs = torch.stack([feature_maps for i in range(batch_size)], dim=0) # 4D
print("Instance Normalization")
print("input data:\n{} shape is {}".format(feature_maps_bs, feature_maps_bs.shape))
instance_n = nn.InstanceNorm2d(num_features=num_features, momentum=momentum)
for i in range(1):
outputs = instance_n(feature_maps_bs)
print(outputs)
输出如下:
Instance Normalization
input data:
tensor([[[[1., 1.],
[1., 1.]],
[[2., 2.],
[2., 2.]],
[[3., 3.],
[3., 3.]]],
[[[1., 1.],
[1., 1.]],
[[2., 2.],
[2., 2.]],
[[3., 3.],
[3., 3.]]],
[[[1., 1.],
[1., 1.]],
[[2., 2.],
[2., 2.]],
[[3., 3.],
[3., 3.]]]]) shape is torch.Size([3, 3, 2, 2])
tensor([[[[0., 0.],
[0., 0.]],
[[0., 0.],
[0., 0.]],
[[0., 0.],
[0., 0.]]],
[[[0., 0.],
[0., 0.]],
[[0., 0.],
[0., 0.]],
[[0., 0.],
[0., 0.]]],
[[[0., 0.],
[0., 0.]],
[[0., 0.],
[0., 0.]],
[[0., 0.],
[0., 0.]]]])
Group Normalization
提出的原因:在小 batch 的样本中,Batch Normalization 估计的值不准。一般用在很大的模型中,这时 batch size 就很小。
思路:数据不够,通道来凑。每个样本的特征分为几组,每组特征分别计算均值和方差。可以看作是 Layer Normalization 的基础上添加了特征分组。
注意事项:
不再有 running_mean 和 running_var
和 为逐通道的
定义如下:
torch.nn.GroupNorm(num_groups, num_channels, eps=1e-05, affine=True)
参数:
num_groups:特征的分组数量 num_channels:特征数,通道数。注意 num_channels 要可以整除 num_groups eps:分母修正项 affine:是否需要 affine transform
下面代码中,输入数据的形状是 ,(2, 4, 3, 3),表示一个 mini-batch 有 2 个样本,每个样本有 4 个特征,每个特征的维度是 。num_groups 设置为 2,那么就会计算 个均值和方差,分别对应每个样本的每个特征。
batch_size = 2
num_features = 4
num_groups = 2
features_shape = (2, 2)
feature_map = torch.ones(features_shape) # 2D
feature_maps = torch.stack([feature_map * (i + 1) for i in range(num_features)], dim=0) # 3D
feature_maps_bs = torch.stack([feature_maps * (i + 1) for i in range(batch_size)], dim=0) # 4D
gn = nn.GroupNorm(num_groups, num_features)
outputs = gn(feature_maps_bs)
print("Group Normalization")
print(gn.weight.shape)
print(outputs[0])
输出如下:
Group Normalization
torch.Size([4])
tensor([[[-1.0000, -1.0000],
[-1.0000, -1.0000]],
[[ 1.0000, 1.0000],
[ 1.0000, 1.0000]],
[[-1.0000, -1.0000],
[-1.0000, -1.0000]],
[[ 1.0000, 1.0000],
[ 1.0000, 1.0000]]], grad_fn=<SelectBackward>)
参考资料
深度之眼 PyTorch 框架班
如果你觉得这篇文章对你有帮助,不妨点个赞,让我有更多动力写出好文章。
