




MobileNet V2
MobileNet V2在MobileNet V1的基础上,引入了线性瓶颈(Linear Bottlenecks)和倒残差结构(Inverted residuals)。
Linear Bottlenecks
作者认为,非线性的激活函数,比如ReLU,会导致信息的丢失。
具体地,作者将一个二维空间的流形( manifolds)通过一个后接ReLU激活的变换矩阵,嵌入到另一个维度的空间中,然后再投影回原来的二维空间。
结果显示:当另一个空间的维度较低(n=2,3,5)时,还原效果很差;当另一个空间维度高一些(n=15,30)时,才能够基本还原。
但是,在接下来你会看到,这里采用的Inverted residuals中的通道数会被最后一个1x1进行压缩,也就是要将3x3卷积提取的特征进行压缩,但这样做就对应了上述实验中另一个空间维度较低时的情况,即"信息丢失"。
针对这个问题,作者提出将卷积后的激活函数设置为线性的。实验证明,该方法能够有效保留信息。具体实现时,只需去掉本来在卷积后的非线性激活函数即可。
Inverted residuals
在ResNet中,你已经见过瓶颈结构,它是一个两头粗,中间细的结构,而这里的Inverted residuals正好相反,下面来具体看一下。
仔细回想,在ResNet中,第一个1x1卷积负责降低通道数,中间的3x3卷积用于提取特征(通道数不变),第二个的1x1卷积负责升高通道数,通道数变化情况为:高-->低-->高,正好是一个瓶颈结构。
而在这里的Inverted residuals中,第一个1x1卷积负责增大通道数(低-->高),中间的3x3卷积用于提取特征(通道数不变),第二个1x1卷积负责降低通道数(高-->低),这与ResNet中的瓶颈结构正好相反。此时的结构类似一个纺锤体: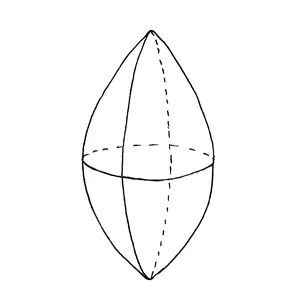
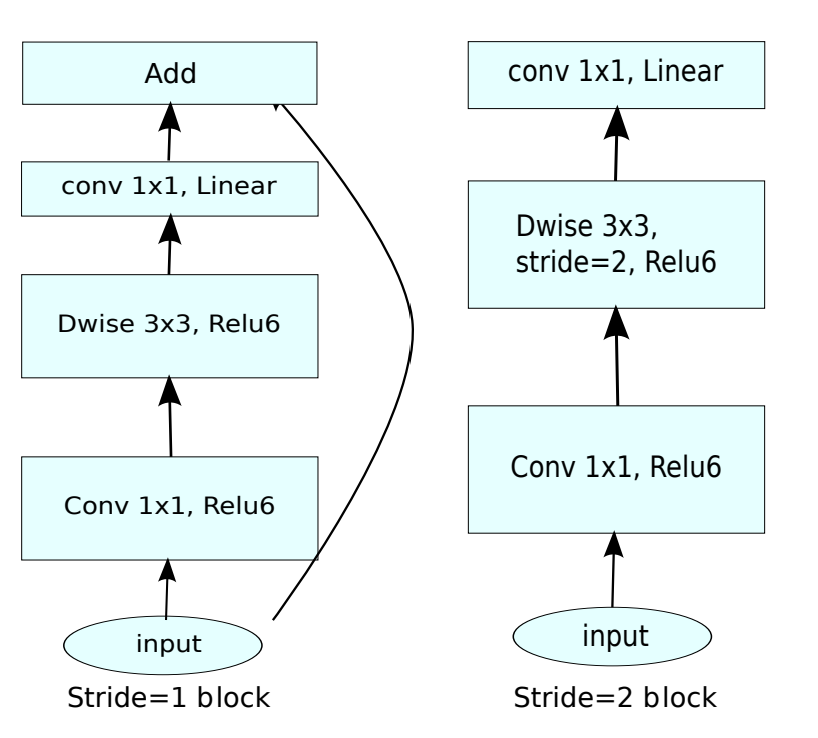
融合我们上面所讲的 Linear Bottlenecks以及Inverted residuals,就得到了MobileNet V2中的bottleneck,其具体结构如下:
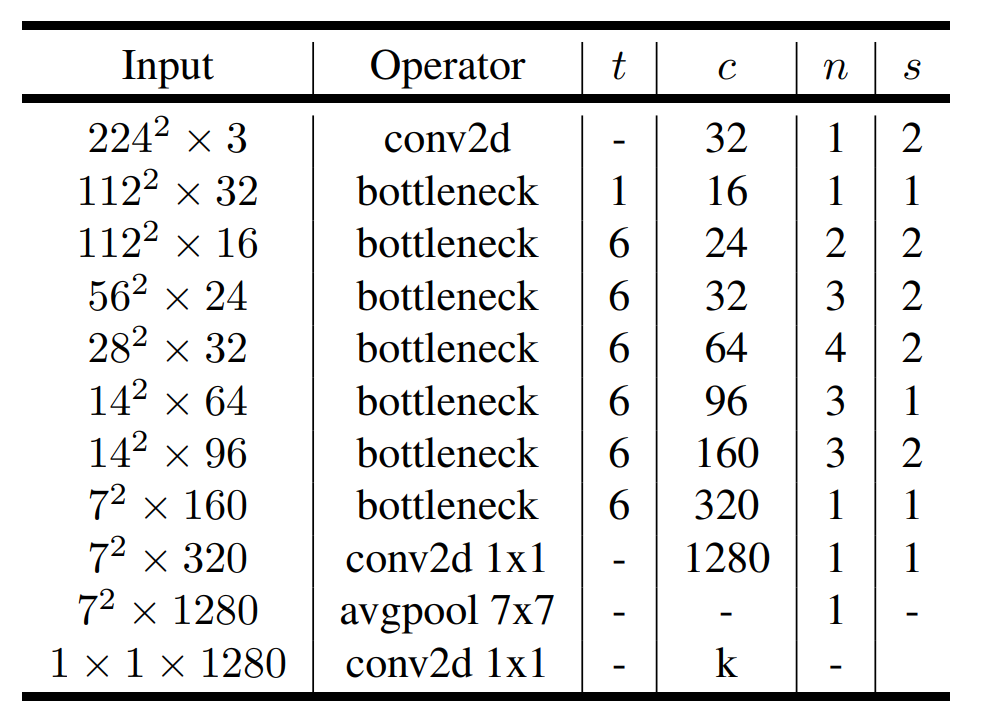
完整的MobileNetV2网络结构如下:
 其中:
其中:
t:expand_ratio,即输入通道变化倍数;
c:通道数;
n:该模块重复次数;
s:stride。注意:对于n>1的情况,只有第一个重复块的的stride等于s,剩余重复块的stride均为1。
PyTorch 实现 MobileNet V2
现在来实现MobileNet V2。
首先实现网络结构图中的bottleneck:
class InvertedResidual(nn.Module):
def __init__(self,in_channels,out_channels,stride,expand_ratio=1):
super().__init__()
self.stride=stride
hidden_dim=int(in_channels*expand_ratio)# 增大(减小)通道数
# 只有在输入与输出维度完全一致时才做跳连
# stride=1时特征图尺寸不会改变;in_channels==out_channels,即输入输出通道数相同时,满足维度完全一致,因此可做跳连
self.use_res_connect= self.stride==1 and in_channels==out_channels
# 只有第一个bottleneck的expand_ratio=1(结构图中的t=1),此时不需要前面的point wise conv
if expand_ratio==1:
self.conv=nn.Sequential(
# depth wise conv
nn.Conv2d(hidden_dim,hidden_dim,kernel_size=3,stride=self.stride,padding=1,groups=hidden_dim,bias=False),
nn.BatchNorm2d(hidden_dim),# 由于expand_ratio=1,因此此时hideen_dim=in_channels
nn.ReLU6(inplace=True),
# point wise conv,线性激活(不加ReLU6)
nn.Conv2d(hidden_dim,out_channels,kernel_size=1,stride=1,padding=0,groups=1,bias=False),
nn.BatchNorm2d(out_channels)
)
# 剩余的bottlenek结构
else:
self.conv=nn.Sequential(
# point wise conv
nn.Conv2d(in_channels,hidden_dim,kernel_size=1,stride=1,padding=0,groups=1,bias=False),
nn.BatchNorm2d(hidden_dim),
nn.ReLU6(inplace=True),
# depth wise conv
nn.Conv2d(hidden_dim,hidden_dim,kernel_size=3,stride=self.stride,padding=1,groups=hidden_dim,bias=False),
nn.BatchNorm2d(hidden_dim),
nn.ReLU6(inplace=True),
# point wise conv,线性激活(不加ReLU6)
nn.Conv2d(hidden_dim,out_channels,kernel_size=1,stride=1,padding=0,groups=1,bias=False),
nn.BatchNorm2d(out_channels)
)
def forward(self,x):
if self.use_res_connect:
return x+self.conv(x)
else:
return self.conv(x)
1x1 conv的stride始终固定为1,因此传入的stride仅针对3x3的depth wise conv有效:当stride=1时,特征图尺寸不变;当stride=2时,特征图尺寸减半。
stride=1时特征图尺寸不会改变;in_channels=out_channels时,输入输出通道数相同。这两个条件都满足时,输入与输出的维度完全一致,因此可做跳连,其余情况则不做。
这里的非线性激活函数统一使用了ReLU6,事实上,在MobileNet V1中就使用过ReLU6。它将原始ReLU作用后的取值限定在之间,而不是,这是为了使得模型在低精度时也能够具有较强的能力,更多细节可自行搜索。
有了bottleneck,就能够实现MobileNet V2了:
class MobileNetV2(nn.Module):
def __init__(self,num_classes=1000,img_channel=3,width_mult=1.0):
super().__init__()
in_channels=32#第一个c
last_channels=1280#最后的c
#根据网络结构图得到如下网络配置
inverted_residual_setting=[
# t, c, n, s
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
#1. building first layer,网络结构图中第一行的普通conv2d
#这里的input_channel指的是第一个bottlenek的输入通道数
input_channel = _make_divisible(in_channels * width_mult, 4 if width_mult == 0.1 else 8)
#print(input_channel)#32
layers=[self.conv_3x3_bn(in_channels=img_channel,out_channels=input_channel,stride=2)]
#2. building inverted residual blocks
for t,c,n,s in inverted_residual_setting:
output_channel = _make_divisible(c * width_mult, 4 if width_mult == 0.1 else 8)
#print(output_channel)#每次循环依次为:32,16,24,32,64,96,160,320
for i in range(n):
#InvertedResidual中的参数顺序:in_channels,out_channels,stride,expand_ratio
layers.append(InvertedResidual(input_channel,output_channel,s if i==0 else 1,t))
input_channel=output_channel#及时更新通道数
self.features=nn.Sequential(*layers)
#3. building last several layers
output_channel = _make_divisible(last_channels * width_mult, 4 if width_mult == 0.1 else 8) if width_mult > 1.0 else last_channels
#print(output_channel)#1280
#网络结构图中倒数第三行的普通conv2d
self.conv=self.conv_1x1_bn(in_channels=input_channel,out_channels=output_channel)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.classifier = nn.Linear(output_channel, num_classes)
def conv_3x3_bn(self,in_channels,out_channels,stride):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels,out_channels=out_channels,kernel_size=3,stride=stride,padding=1,groups=1,bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU6(inplace=True)
)
def conv_1x1_bn(self,in_channels,out_channels):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels,out_channels=out_channels,kernel_size=1,stride=1,padding=0,groups=1,bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU6(inplace=True)
)
def forward(self,x):
x=self.features(x)
x=self.conv(x)
x=self.avgpool(x)
x=x.view(x.size(0),-1)
x=self.classifier(x)
return x
上述代码首先实现了网络结构图中最开始的Conv2d,接着使用for循环实现了bottleneck的堆叠,最后实现了剩余的层(Conv2d,avgpool,Conv2d)。
其中,_make_divisible
函数实现如下:
def _make_divisible(v, divisor, min_value=None):
if min_value is None:
min_value = divisor
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
#确保通道数减少量不能超过10%
if new_v < 0.9 * v:
new_v += divisor
return new_v
该函数的作用是将通道数调整为8或4的倍数(这里是8),以便更能利用硬件进行加速,关于这一点了解即可,这里给出一个直观的测试结果: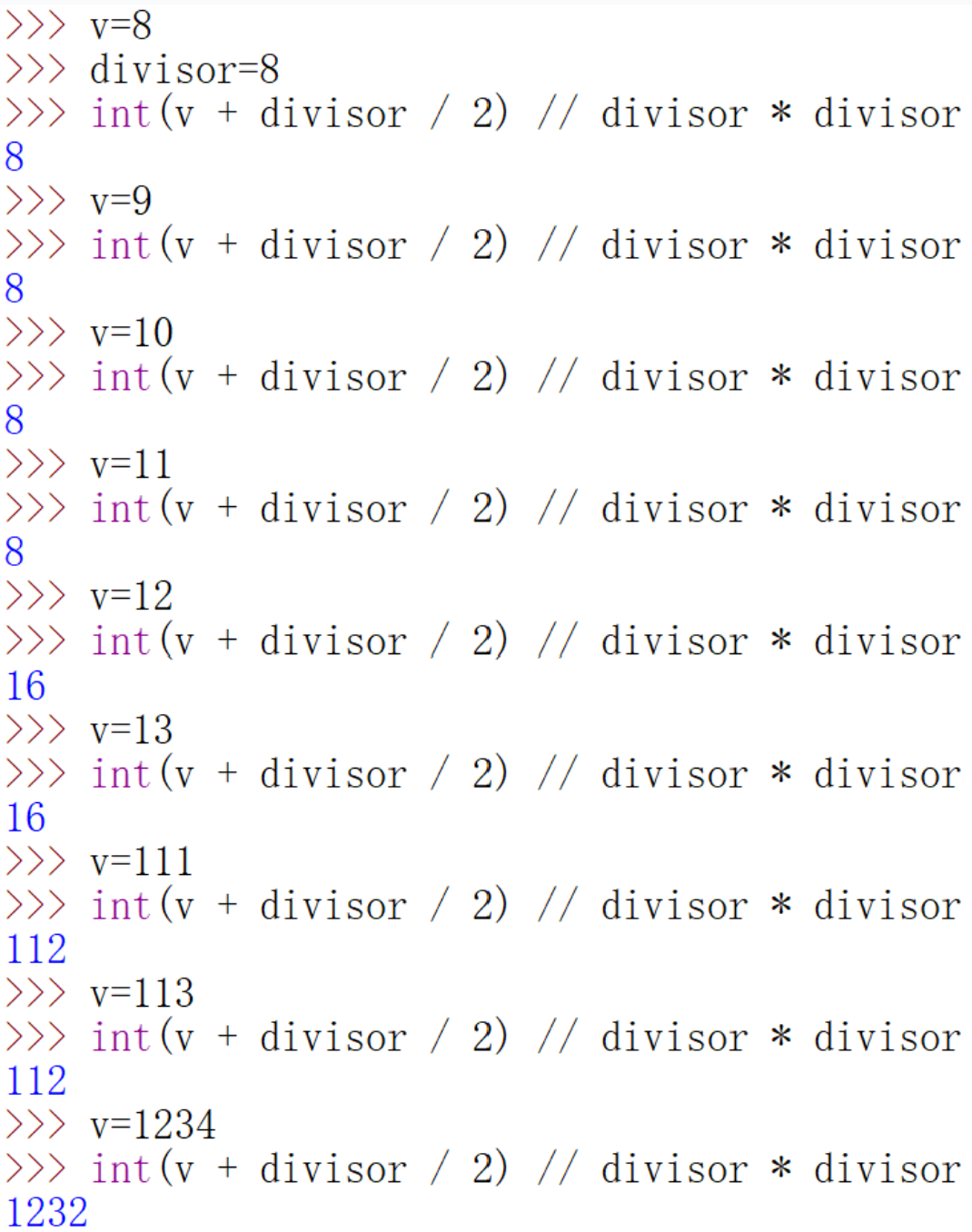
看,通道数总能够被转化为8的倍数。
最后,来测试一下刚刚实现的MobileNet V2:
参考:
[1] https://arxiv.org/pdf/1801.04381.pdf [2] https://github.com/d-li14/mobilenetv2.pytorch/blob/master/models/imagenet/mobilenetv2.py [3] https://www.bilibili.com/video/BV1qE411T7qZ?from=search&seid=14184470112160598991
南极Python交流群已成立,长按下方二维码添加我的微信,备注加群即可,欢迎进群学习交流(划水 )
)

原创不易,感谢点赞,分享和在看的你!
