




「转载自:https://mp.weixin.qq.com/s/BcfdCwfqX7DC3h1W2lNpxA」
2024 年 5 月 9 日-11 日,鲲鹏昇腾开发者大会在北京中关村国际创新中心举行,大会以“心怀挚爱,共绽光芒”为主题,旨在打造一个开放、共享、学习交流的平台。湖南大学嵌入式实验室(以下简称“嵌入式实验室”)在本次大会上展示了基于 ZVM 平台的两轮自平衡小车,不仅向业界展示了嵌入式实验在嵌入式技术领域的创新成果,还突显了 ZVM 平台与OpenAtom openEuler(简称“openEuler”) 开源操作系统的紧密结合所带来的优势。这次展示也为开发者提供了一个宝贵的机会,深入了解了嵌入式实验室的技术研发能力,探索潜在的合作机遇。
图 1 湖南大学 & openEuler 展台
在大会展区中,嵌入式实验室技术研究员温浩和王中甲进行了基于嵌入式实时虚拟机 ZVM 的平衡车实时演示,通过展示平衡车的实时表现,向与会者生动展示了 ZVM 平台在嵌入式领域的潜力和应用前景。他们详细讲解了平衡车的运动控制算法和 ZVM 平台的关键特点,为与会者提供了深入了解和探索的机会。这次实时演示不仅让开发者们对嵌入式实验室的技术能力有了直观的了解,也引发了与会者对 ZVM 平台和嵌入式实时虚拟化技术的兴趣。
图 2 实验室成员向参会嘉宾介绍 ZVM 平衡车
ZVM 是一款基于著名开源实时操作系统 Zephyr 结合硬件辅助虚拟化技术的嵌入式实时虚拟机,支持包含 Linux、实时操作系统和 baremetal 程序在内的多个运行时混合部署以及混合关键性调度。
ZVM 由嵌入式实验室主任谢国琪教授团队开发,在 openEuler SIG-Zephyr 持续孵化。基于不同芯片架构硬件虚拟化支持与虚拟化主机拓展支持,ZVM 实现了 Guest OS 间的隔离、设备分配及中断处理,保证了系统的安全与实时。ZVM 主要应用场景是智能汽车、智能机器人、智能制造等领域的高端复杂嵌入式系统。2023 年 4 月,嵌入式实验室正式将该项目开源到 openEuler 社区。
项目地址
https://gitee.com/openeuler/zvm
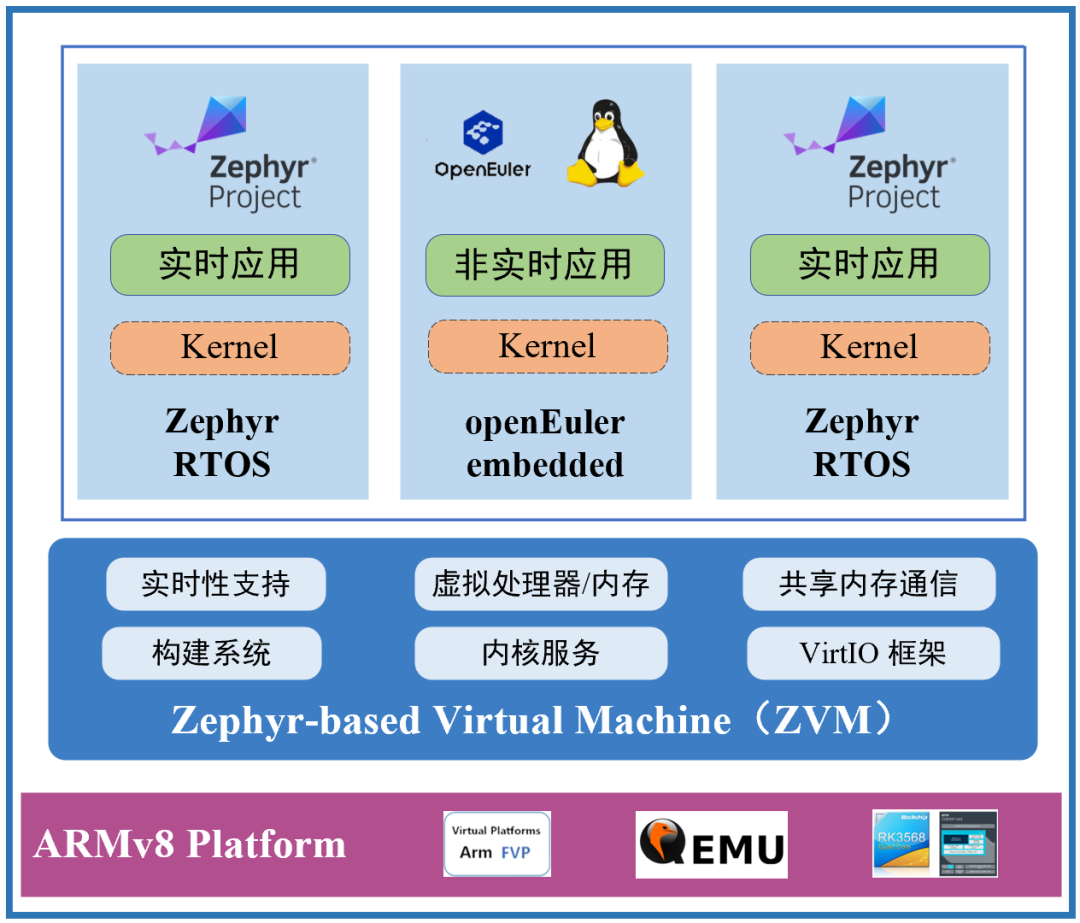
图 3 ZVM (Zephyr-based Virtual Machine)
实验室将 ZVM 平台部署到了一款基于 RK3568 主控的二轮平衡小车上。该小车的运动控制系统采用了 Zephyr 实时操作系统(Zephyr RTOS),而人机交互界面则由 openEuler 开源操作系统提供。此外,小车的硬件还包括六轴传感器和电机驱动模块,以及 JGB-520 编码器减速直流电机。通过共享内存的实时通信机制,Zephyr RTOS 和 openEuler 体现了紧密的协作。Zephyr RTOS 利用 PID 控制算法对小车进行实时控制,并进行实时的数据采集。而 openEuler 则能够向 Zephyr RTOS 发送控制指令,并将小车的数据进行展示。这种综合应用方案为嵌入式系统的开发和应用提供了全面的功能支持。Zephyr RTOS 的实时性和低延迟性能保证了对小车运动的精确控制和数据采集,而 openEuler 的强大功能和友好的用户界面则使人机交互更加便捷。
图 4 基于 ZVM 的二轮平衡小车
嵌入式实验室“基于 ZVM 平台的两轮自平衡小车”体现了 ZVM 在复杂嵌入式系统中的实际应用价值。实验室将继续推动 ZVM 平台的研究和发展,并与 openEuler 开源操作系统、瑞芯微等生态伙伴紧密合作,不断拓展嵌入式技术的边界,为行业的创新和进步做出贡献。
