




在分布式系统中,时钟非常重要,物理时钟(Physical Time,也称PT),逻辑时钟(Logical Clock,也称LC),向量时钟(Vector Clock,也称VC),真实时钟(True Time,也称TT)、混合逻辑时钟(Hybrid Logical Clock,也称HLC),等概念需要深入了解。
-
物理时钟-Physical Time, PT
物理时钟即机器本地的时钟,而由于设备硬件不同,本身存在偏差,一天的误差可能有毫秒甚至秒级,所以需要对不同的机器时钟进行同步使得机器的时间进行相对统一。NTP是目前比较常用的同步时间的方式,其机制为CS架构,每台机器上存在一个NTP的客户端,与NTP的服务端进行同步,校准本地的时间。关于NTP具体的设计细节本文不做详细介绍,需要知道的是,由于NTP走网络传输,势必会导致同步后的物理时钟与远程NTP服务器的时钟存在一定的偏差。 -
逻辑时钟-Logical Clock, LC
由于在分布式场景下,不同机器的时间可能存在不一致,那么就没办法对跨节点的事件确定的先后关系。所以Lamport推出了逻辑时钟的概念,通过happened-before关系确定事件的逻辑时钟,从而确定事件的偏序关系。
那什么是happened-before关系?
-
如果a, b事件都是位于一个进程内(假设顺序发生,不考虑并发),且a位于b之前发生,那么a happened-before b, 记作:a hb b或者a->b,C(a)<C(b),C表示逻辑时钟。
-
如果a,b事件是位于2个进程内,a为消息的发送事件,b为同一个消息的接收事件。那么同样 a hb b。
Lamport的算法就是根据happened-before关系来确定逻辑时钟序的。
lamport_timestamps -
每个事件都有1个逻辑时间戳,初始为0。
-
如果事件发生在节点内部,则时间戳+1.
-
如果事件属于发送事件,则时间戳+1,并在发送的消息中携带时间戳。
-
如果事件属于接收事件,则时间戳=max{本地时间戳,消息中的时间戳}+1。
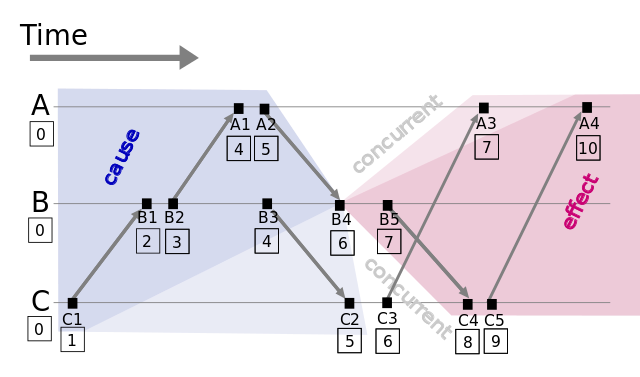
这样,通过该算法就确定了一个消息的偏序关系,比如上图中C1->B1, B1->B2, B2->A1。那么如何确定全序关系?通过给每个进程指定初始的优先级来确定,比如上图的A, B, C三个进程,我们分别指定A=1, B=2, C=3表示3个不同的序号,那么假设有2个相同的逻辑时钟C(B4)=C(C3),因为C=3>B=2,所以C(B4)<C(C3)。通过这种实现定序的方式,可以对所有事件排序,得到全序关系。
- 向量时钟-Vector Clock, VC
LC能够保证a->b=>C(a)<C(b)(=>表示推导),但是不能通过C(a)和C(b)的大小推出a, b事件发生的先后顺序。
向量时钟是1988年,基于逻辑时钟提出的一个向量化的逻辑时钟,可以保证由C(a)<C(b)=>a->b。其由一个向量构成,向量的每个元素即是一个逻辑时钟,也叫做版本号,向量的维度等于节点个数,每个结点通过不同维度的版本号握有全局信息。向量属性如下:
- VCi[i]表示进程i上面事件发生的个数。
- VCi[j]表示进程i知道的j进程上面发生的事件发生数,即进程i对进程j的认知。
向量更新算法:
进程i每次发生1个事件,对VCi[i]+1
当进程i发送消息给进程j时,携带进程i的信息VCi整个向量时钟(进程i对全局的认知)。
当进程j收到进程i时,更新自己的VCj[k]=max{VCi[k], VCj[k]}, k从1-n,即向量内部所有维度都需要更新。
3.1 VC举例
比如同样上面的例子,有a, b, c三个机器,那么就有三个向量维度。
初始状态下每个维度状态都是0:
-
VCa: [0, 0, 0]
-
VCb: [0, 0, 0]
-
VCc: [0, 0, 0]
a发生了1个事件,向量时钟更新: -
VCa: [1, 0, 0]
-
VCb: [0, 0, 0]
-
VCc: [0, 0, 0]
过段时间b和c收到来自a的更新,更新本地向量时钟: -
VCa: [1, 0, 0]
-
VCb: [1, 0, 0]
-
VCc: [1, 0, 0]
同一段时间内,b发生2次事件,更新本地向量时钟: -
VCa: [1, 0, 0]
-
VCb: [1, 2, 0]
-
VCc: [1, 0, 0]
同样,过段时间a和c收到来自b的更新,更新本地向量时钟: -
VCa: [1, 2, 0]
-
VCb: [1, 2, 0]
-
VCc: [1, 2, 0]
向量时钟更新存在一个问题,加入两端同时更新,那么最后应该采用哪个结果,比如b更新为[1, 3, 0], c更新为[1, 2, 1],那么b和c该如何合并?VC只发现冲突,并不处理,具体的处理方式可以有多种,比如交由客户端进行处理合并、最后一个更新生效(last write win)等。
-
真实时钟-True Time, TT
TT包括一个时间戳t,还有一个误差e(e通常稳定在4ms以内,误差为[-e, +e])。其实现的基础是基于GPS和原子钟。之所以采用2种技术是为了保证精确度。GPS有一个天线,电波干扰会导致失灵。而原子钟比较稳定,当GPS失灵的时候,原子钟仍然能够保证在一段相当长的时间内,不会出现偏差。
每个数据中心需要部署一些主时钟服务器(Master),其他机器上部署一个从时钟进程(Slave)来从Master进行时钟同步。Master可以采用GPS或者原子钟的方式。Slave定期30s从若干个Master同步时钟信息。
Google Spanner使用了一种延迟提交(Commit Wait)的手段,即如果事务T1的提交版本为时间戳t那么事务T1会在t+e之后才能提交。借用这种方式消除误差e带来的影响,从而保证线性一致性。这种方式的缺点是,事务的提交需要延迟等待,这为系统的性能带来了影响,比如e, g事务有happened-before关系,那么e的延迟提交将导致f被delay;另外,原子钟的实现代价非常高昂。 -
混合逻辑时钟-Hybrid Logical Clock, HLC
刚才我在介绍向量时钟时讲过逻辑时钟的缺点:不能通过C(a)和C(b)的大小推出a, b事件发生的先后顺序。这个会在使用时导致很多困扰,比如一个外部系统在一个逻辑时钟的分布式系统下的2个进程内部先后提交了互不相关的2个事务:e和f,f在e之后再提交。那么理论上应该e先完成,然后再f,但在逻辑时钟视角下,可能f在e之前先完成了。这个问题有几种解决方式,1种是将这个外部系统划入当前分布式系统内,但你不可能杜绝外部系统的调用;另外就是让逻辑时钟和物理时钟达成一致,这个比较困难,混合逻辑时钟HLC就是一种“尽可能”的方式。
混合逻辑时钟是2014年提出的,混合了物理时钟PT和逻辑时钟LC。其推出的目标是为了实现以下4个目标:
- 满足LC的因果一致性happened-before。
- 单个时钟O(1)的存储空间(VC是O(n),n为分布式系统下的节点个数)。
- 单个时钟的大小有确定的边界(不会无穷大)。
- 尽可能接近物理时钟PT,也就是说,HLC和PT的差值有个确定的边界。这条规则的好处是,只要两次操作间隔大于这个确定的边界,就可以保证因果一致性,无论是否是当前分布式系统内的。
混合逻辑时钟一共64位,高32位是秒级时间戳,低32位是计数。
