




Join 重排是查询优化中的一个关键步骤,此阶段优化器通常会通过下面三个步骤枚举可行的join 顺序,并选择代价最小的 join 顺序:
1. 在计划空间找出一些 join 顺序(join plan enumeration);
2. 根据统计信息进行估算结果集大小(cardinality estimation);
3. 把估算结果带入代价模型计算每个 join 顺序的代价(cost model)。
毫无疑问,上述三个优化模块都非常重要,但他们对优化的贡献哪个大,能不能通过实验量化出来,而不只是直觉上和经验主义的衡量?
论文通过创新的实验回答了上述问题,并且产出了一些对优化器设计富有指导性的结论,如:
1. 这三个模块哪个对优化的贡献最大?
2. 怎么设计实验才能单独的测试出上述每个模块的贡献?
3. 为什么不推荐用 TPC-H,TPC-DS 等数据集来测试优化器能力?
4. 和直方图比起来,什么样的统计信息能更好的捕捉数据中的关联性?
除此之外你还会看到一些非常有趣的实验结果:
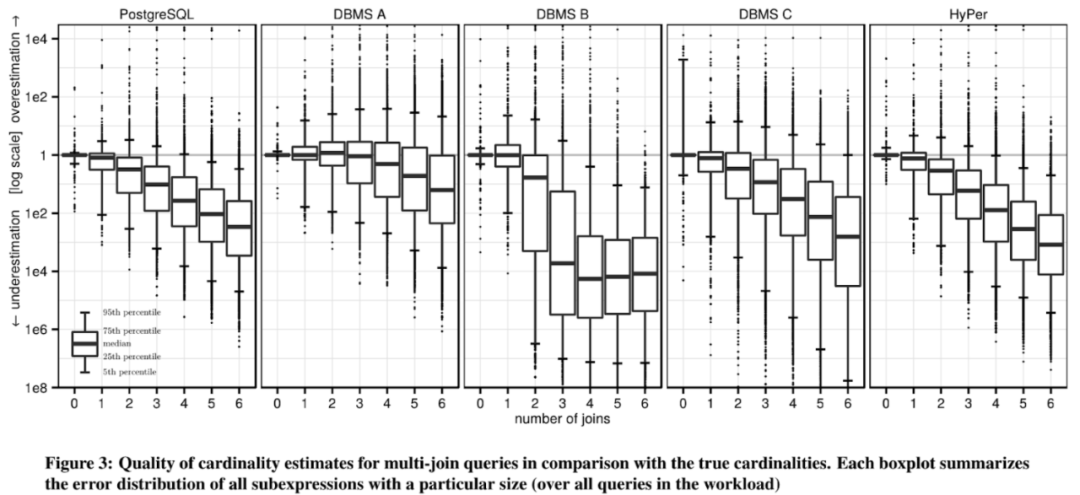
1. 随着 join 表数增加,部分 DB 会出现系统性的低估;
2. PostgreSQL 优化器中一个 “负负得正” 的例子;
3. 关闭掉 PostgreSQL 的 NestedLoopJoin 后优化效果反而变好。
下面会分别介绍论文中的实验方法,对上述三个模块的实验过程和结果分析,最后是总结。
完整的论文《How Good Are Query Optimizers, Really?》欢迎点击【阅读论文】查看。
实验方法
这节分别从数据集选择,DB 选择,查询构造,实验环境等环节介绍作者怎么设计实验。
阅读这一节后你将知道作者为什么不推荐使用 TPC-H,TPC-DS 等数据集来测试优化器。
数据集选择
许多论文都用 TPC-H,TPC-DS,SSB 等数据集来测试优化器,但作者认为这些数据集不能很好的测出优化器的能力。
DB 选择
作者选用 PostgreSQL 进行测试, 原因如下:
1. 传统架构,包含上述的三个模块;
2. 开源免费,易于修改;
3. 没有自适应 join,优化器指定的执行顺序不会在执行阶段被再次改变。
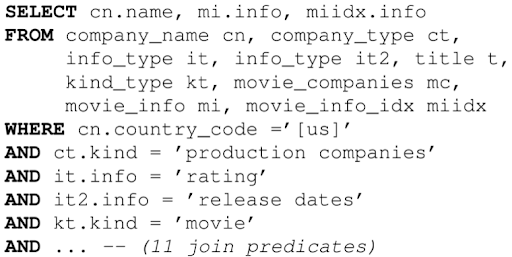
接下来对 PG join 估算公式进行介绍,同时看一下为什么不推荐使用 TPC-H 等数据集:

左边表示 T1 和 T2 在 x 和 y 列进行 join 的结果行数,右边的 |T1| 表示 T1 表的行数,dom(x) 表示这一列的 NDV(number of distinct values);
该公式基于均匀、独立、包含三个假设,下面是一个例子:

如 T1 和 T2 两个表分别有 6 和 4 行,NDV 分别为 3 和 2,那基于均匀假设,T1 可以写成 {x, x, y, y, z, z} 的模式;再给予独立和包含的假设,T2 可以写成 {x, x, y, y} 的模式;则他们的 join 结果,就是上述公式的计算结果。
可以看出,如果数据基于这三个假设生成,那就刚好命中上述估算规则,使得估算对优化器来说没有任何难度;这就是作者不推荐使用 TPC-H 等数据集测试优化器的原因。
查询构造
估算导出和注入
作者把 113 个查询,导入了 5 个 DB(PG、Hyper、3 个商业 DB),然后导出了他们所有的中间估算结果。
如 select * from A, B, C where A.bid=B.id and B.cid=C.id and A.x=5,他的中间结果有:
1. where A.x=5;
2. where A.x=5 and A.bid=B.id;
3. where B.cid=C.id;
4. where A.bid=B.id and B.cid=C.id and A.x=5。
然后修改 PG 的代码,支持把这些中间结果注入到 PG 里面,这样可以隔绝掉不同执行器对执行时间的影响,后面会用来进行对比实验。
实验环境
环境上只有一件重要的事情,就是作者把 PG 的内存调整到了 64GB,IMDB 的所有数据都在内存中!
估算测试
单表估算测试
作者先进行了单表的基数估算测试,比如:
1. where t.a = 1;
2. where t.a > 1 and t.b = 2;
3. where t.str like “%abc%”。
为了衡量估算效果,引入了 q-error,定义为真实值和估算值的比值,取大于 1 的形式;
如真实值是 100,那估算值为 10 或者 1000,最后的 q-error 都是 10 = 100/10 = 1000/100。
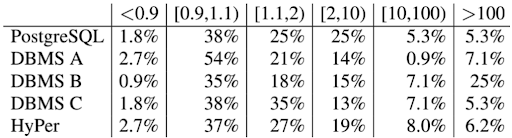
下图是 JOB 中 113 个查询的单表估算,在这 5 个 DB 中的结果:
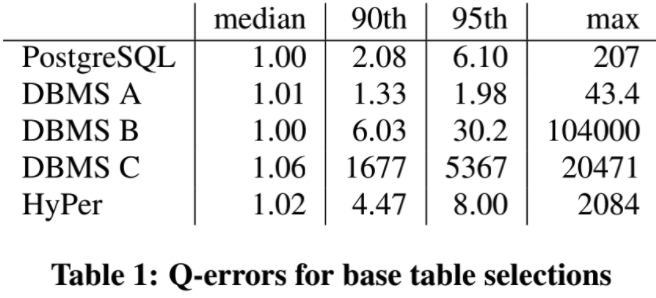
可以发现:
1. 所有 DB 的中位数 q-error 都挺好,接近于最优值 1;
2. 所有 DB 都可能出现误差验证的情况,即 max(q-error) 较大;
作者发现 Hyper 在进行复杂条件估算(如 LIKE 或者多个复杂表达式)时,效果最好。
分析后发现 Hyper 为每个表维护了 1000 行的采样数据,在处理复杂条件时,会直接作用在上面用于估算。
这种维护采样的方式,比起如 PG 的维护单列直方图的方式,能更好捕捉到多列数据关联性。
比如有两列 A 和 B,有隐含的关联条件为 A 恒等于 B*2,现在要求估算 A=2 and B=1:
1. 如果是基于单列直方图,则需要依赖独立性关系假设,估算公式为 Sel(A=2) * Sel(B=1),这个公式明显忽略了这个隐含的关联信息;
2. 而 Hyper 这种采样的方式,则能很自然的捕捉到其中的关联性;
Join 多表估算测试
接下来测试各个 DB 对多表 join 的估算:
TPC-H Join 估算测试
接下来是 TPC-H 的 join 估算测试:
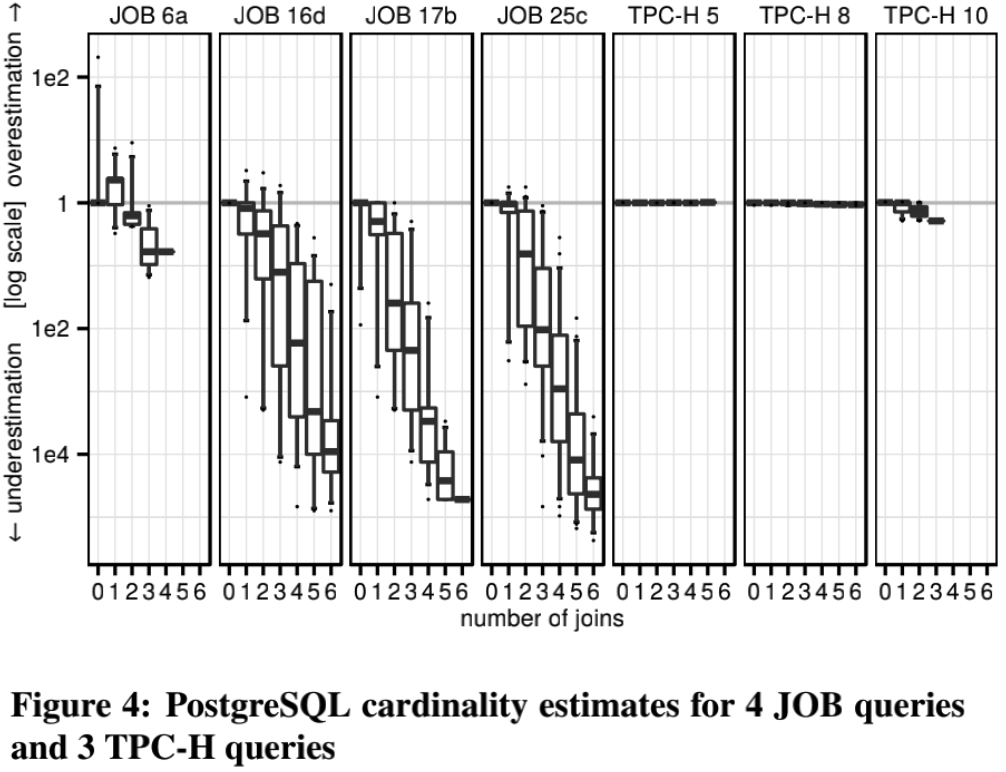
可以发现,TPC-H 对 PG 的优化器构成不了什么挑战,再一次验证了之前说的结论。
NDV 注入测试
根据一开始对 PG join 估算的介绍,我们知道其中最重要的一个参数就是 NDV,为了验证 NDV 对 PG 估算的具体影响,我们将 JOB 查询的真实 NDV 注入到了 PG 当中,然后进行了测试:
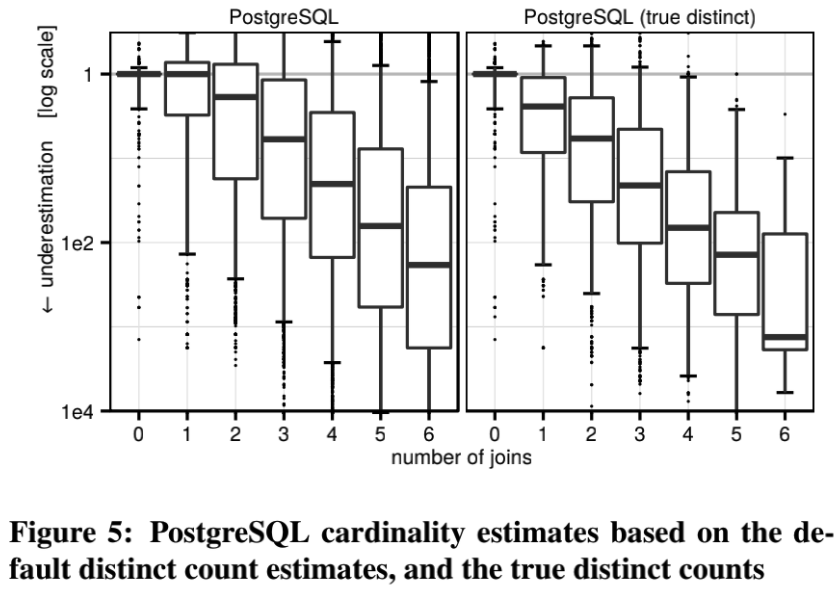
很有趣,发现注入真实 NDV 后,估算结果反而变差了!
这是因为:
1. 如前文所说,随着 join 数量增加,PG 会系统性低估;
2. PG 的统计信息采集方式会造成 NDV 被低估;
3. 根据 PG 的 join 估算公式,低估的 NDV 造成高估的 join 估算结果;
上面 3 个原因,使得原本被低估的 NDV,反而能够修正一些系统性低估的误差,出现了“负负得正”的效果!
基数估算误差对查询时间影响测试
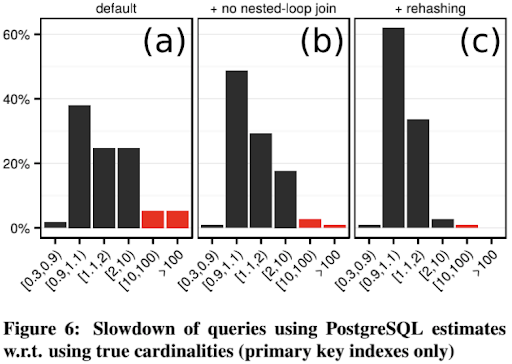
在这个实验中,将不同 DB 的估算结果(包括真实基数),都注入到 PG 中,然后运行并记录时间;这样可以屏蔽掉不同 DB 执行器的影响,只验证他们估算误差对执行时间的影响;然后将运行时间和最优计划的运行时间(通过注入真实基数得到)做比,得到下面结果:
然后有下面的结论:
1. 和最优计划(使用真实基数)比起来,所有 DB 中大部分查询执行时间都显著变长,也就是比值 >= 1.1 的部分,这反向展示出估算误差对查询时间的影响;
2. 少数查询的耗时降低了,也就是 <0.9 的部分,这是由于 cost model 误差引起;
3. 所有 DB 都有部分查询耗时严重增加,也就是 >= 10 的部分;
过于依赖估算的风险
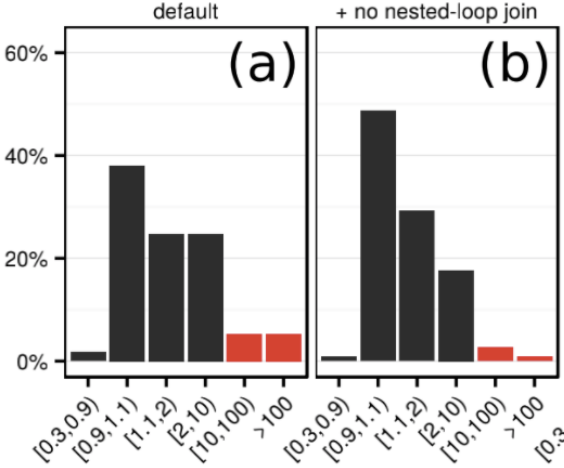
接着分析上述实验中,耗时增加严重的那些查询,也就是 >=10 的部分,发现大部分都是由于把 HashJoin 选错成 NestedLoopJoin 造成的。
分析 PG 代码,发现它的 join 选择只考虑 cost,相当于完全相信估算的准确性,而不考虑风险;HJ 的复杂度是 O(N),NLJ 的复杂度是 O(N^2),如果 HJ 的代价是 100001,NLJ 代价是 100000, 也会选择 NLJ。
结合之前之前所说,随着 join 数量增加,PG 容易出现系统性低估,这就使得 PG 容易出现误选 NLJ 的情况,由于其复杂度高,使得执行时间大大增加。
作者认为这样的策略是低收益高风险的,应该避免,如下图,关闭掉 NLJ 后,耗时严重的查询变少了:
还有一部分查询较差,是由于估算偏低,导致 HashJoin 事先分配的 hash table 过小,导致执行时冲突大,延长了执行时间。
在 PG 之后的版本中,执行器实现了自适应的 rehashing 功能,作者把这个功能移植到了目前实验的 PG 中,又进行了一次实验:
代价模型
本节作者对比了 3 种不同的代价模型,尝试衡量出代价模型对优化效果的影响。
实验用的三个代价模型
在这个小节,作者使用了 3 个代价模型,来测试他对执行耗时的影响。
第一个代价模型是 PG 原生的,其特点为:
1. 面向磁盘,主要考虑 CPU 和磁盘 I/O;
2. 通过不同的权重把 CPU 和磁盘 I/O 结合起来作为代价。
因为测试中所有数据都在内存中,于是第二个就是在 PG 模型为内存调整:
1. PG 原生代价参数认为磁盘操作比 CPU 操作贵 400 倍;
2. 作者把这个代价参数除以了 50,相当于任务内存操作比 CPU 操作贵 8 倍。
第三个模型(Cost-Main-Mem)特别简单,只考虑了算子处理的数据行数,大致如下:
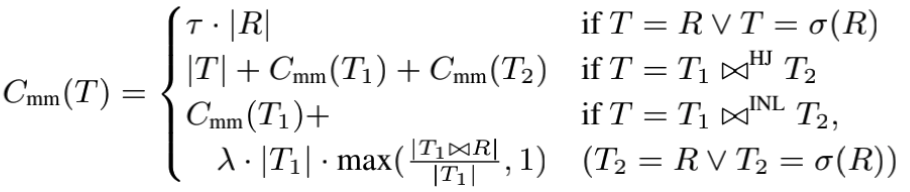
比如 HashJoin 的代价就是左右儿子的代价,加上产出的行数,也就是 |T|;
Selection 和 IndexJoin 的两个参数,主要是用来调整表扫描,和索引扫描的代价权重;
代价模型试验
作者在使用估算,和使用真实基数,两种情况下,对三种模型进行了试验,并对试验结果使用了线性回归,如下图:
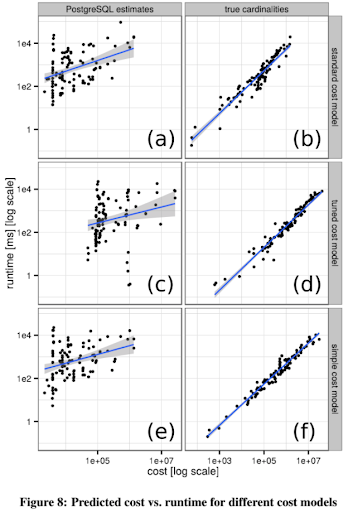
上图中,横坐标是代价,纵坐标是执行时间,蓝色的线是线性回归的结果,灰色部分是抖动。
首先需要知道,什么样的代价函数,是好的代价函数?显而易见它要满足下面两个性质:
1. 递增:也就是更高的代价,对应更长的执行实际;
2. 误差小:也就是观测点,尽量分布在代价函数的两侧,抖动不要太大;
作者对试验结果使用了线性回归,而不是更复杂的函数,原因是在使用真实基数的情况下,线性函数能很完美的满足上面两个性质了(拟合度足够高),我们可以把这个线性回归的结果,当做我们的代价模型函数。
分析上图,我们可以发现:
1. 在没有使用真实基数的情况下,调整代价模型对执行时间的影响不大,a,c,e 中的查询执行时间并没有显著的降低;对比 Figure 6,可见和估算比起来,代价模型的影响相对小很多;
2. 使用真实基数后,d 和 f 中查询时间的几何均数,分别比 b 中快 41% 和 34%,可见代价模型的调整还是有一定收益;
Join 计划空间
这小节作者通过多个实验,探究了 join 顺序,bushy-tree 结构及不同的 join 算法对优化效果的影响。
Join 顺序的影响
作者使用了 Quickpick 算法,为每个查询,生成了 10000 种 Join 顺序,看他们的执行时间。
Quickpick 相当于每次随机选两个 join 节点连接,用来生成随机的 join 顺序;
有了 join 顺序,作者并没有真实的执行,因为从上小节的实验来看,在使用真实基数的情况下,代价模型已经能比较准确的反映执行时间,于是作者直接计算了他们的代价,作为标准来衡量执行时间;
下面是实验结果:
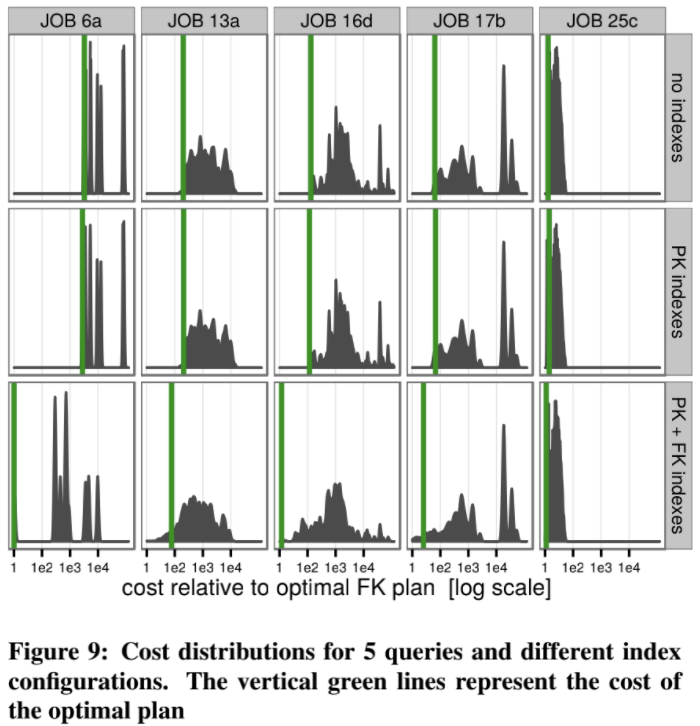
横坐标为代价(相当于执行时间),纵坐标表示分布,可见:
观察所有图的分布,最好的 join 顺序比最差的好处几个数量级,可见 join 顺序对执行时间的影响巨大;
对比第三排和前两排,可知更多的 index 能有效降低多表查询的时间;
Bushy Tree 测试
这一小节实验主要想看 bushy-tree 结构对结果的影响。
PG 的 join 重排算法基于 DP,可以遍历到所有的 join 顺序,作者修改它,只遍历 left-deep, right-deep, zig-zag 三种模式,即不包含 bushy-tree。
用这三种模式的遍历结果,和最优的 join 顺序(通过原有的 DP 算法得到,可能是 bushy-tree)做比,得到下面的结果:
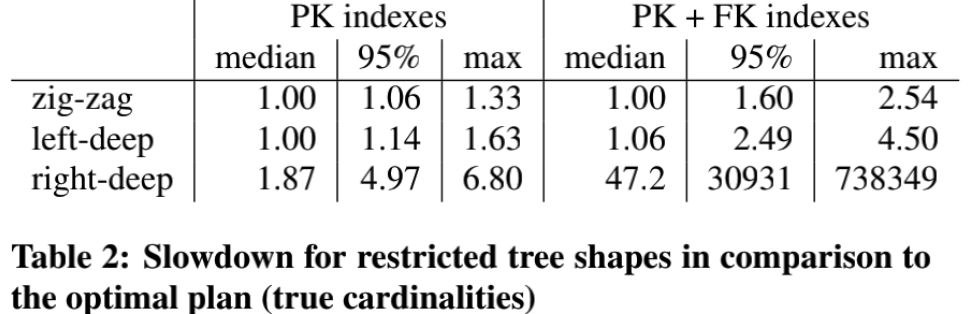
在只有主键索引的情况下,不包含 bushy-tree 结构的 zig-zag 模式的空间遍历,已经能取得较好的结果了,对最差的 95% 分位的查询而言,仅比最优解慢 6%。
right-deep 比 left-deep 差的原因和 PG 的 hash join 实现有关,如下:
对于一个 N 表 join 的查询而言,right-deep 的模式需要构造 N-1 个 hash 表来存中间结果,上图的红色部分。
Join 重排算法测试
为了对比不同 join 重排算法对结果的影响,作者选用了 3 个算法进行对比测试:
1. PG 原本的 DP 算法:遍历全部的空间,能选取到最优解;
2. Quick-1000:对每个查询随机产生 1000 种 join 顺序,然后选取其中代价最小的;
3. 贪心算法:每次选估算结果最少的两个表进行 join,直到所有表被 join 起来。
同样的,作者记录不同算法获取的计划,和最优计划代价的比值,实验结果如下:

下面进行分析:
1. 当使用真实估算时,DP 能 100% 得到最优计划,因为他能完全遍历所有空间;
3. 使用真实估算后,各个算法的准确率都大幅度提升,可见真实估算带来的收益,比调整 join 算法的收益大;
总结
论文通过创新的实验,量化了优化器各模块的收益,并产出了一些富有指导性的结论:
1. 优化收益:基数估算 > 计划空间 > 代价模型;
2. TPC-H 的数据分布过于简单,对优化器的基数估算形成不了挑战,推荐使用 JOB;
3. 像 Hyper 那种为 table 维护采样的方式,能简单且鲁棒的探测多列数据中的关联性;
4. 优化器最好考虑估算误差带来的风险,避免低收益高风险的优化;
5. 如果可能,尽量在执行期间引入自适应技术,来缓解掉优化器估算错误的影响。
完整的论文欢迎点击【阅读原文】查看。
关于投稿:
我们通过【知乎专栏“分布式系统之美”】接收投稿请求,专栏编辑组将在后台进行审稿,通过后将第一时间发布在知乎专栏上~
欢迎大家点击【阅读原文】关注我们的知乎专栏,更希望志趣相同的小伙伴们加入我们,一起创作、分享!

