




轨迹分割是轨迹挖掘的一个基本预处理步骤,是轨迹数据挖掘中重要的过程之一。然而,以往的方法通常可扩展性较差,或者需要较多的特征工程和交通领域知识,亦或假设样本独立同分布。本文介绍南方科技大学团队在AAAI 2021人工智能大会发表的论文《Capturing Uncertainty in Unsupervised GPS Trajectory Segmentation Using Bayesian Deep Learning》,旨在解决上述问题。
一. 背景
智能交通管理不仅需要用户出行模式的统计信息,还需要了解用户对应的交通方式。虽然GPS轨迹可以很容易地从现代智能手机和汽车上的GPS传感器中获得,但这些大量的地理空间数据既没有通过交通方式进行标记,也没有按照交通方式进行分割,从而使交通方式的识别变得复杂。此外,学习到的模型参数或GPS传感器读数可变噪声会引起预测不确定性,现有方法未考虑这种预测不确定性。为了解决上述问题,论文提出了一种用于无监督GPS轨迹分割的贝叶斯深度学习框架。将未标记的GPS传输轨迹预处理为运动特征序列后,这些运动特征序列输入到无监督训练的信道校准时间卷积神经网络,用来时间步长级的交通模式识别。在测试时,通过蒙特卡洛dropout抽样近似变分推断,利用预测分布的均值和方差对每个输入时间段进行分类,并分别估计其预测不确定性。该方法在不使用任何标签的情况下,优于其非贝叶斯变体和在微软Geolife数据集上建立的GPS轨迹分割基线。
二.方法介绍
从语义分割、深度聚类和贝叶斯深度学习的最新发展中汲取灵感,本文将GPS轨迹分割问题转化为时间步级的交通模式识别问题,提出了一种信道校准的贝叶斯时域卷积网络(BTCN)框架,用于无监督、不确定性感知的GPS轨迹分割。
1.框架介绍
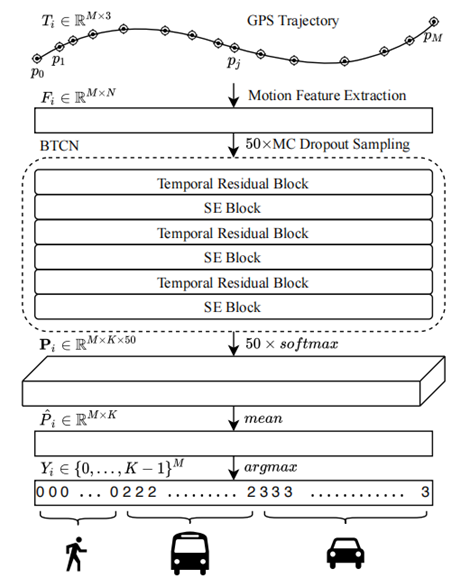
图1 BTCN架构图
BTCN的架构图如图1所示。BTCN将TCN模块与SE模块进行融合,通过特征映射相互依赖的知识来增强学习到的时间轨迹表示。在推理时,从每个GPS轨迹中提取一系列运动特征,并在触发dropout时多次从BTCN中采样。
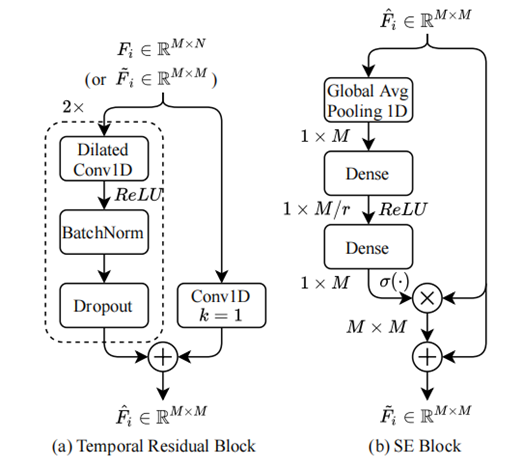
图2 BTCN的主要组成部分
与TCN相似,BTCN的基本成分是时间残差模块。如图2(a)所示,残差路径首先执行一个可选的单位核大小的1D卷积,以保证输入特征的数量与期望的输出通道数量相匹配。至关重要的是,后者被设置为与输入序列的长度相等,从而允许TCN产生与其输入相同长度的序列。接下来,该块应用两个连续的扩张1D卷积,每个卷积之后是一个ReLU激活函数,一个批规范化层,最后是一个dropout层。与标准的卷积相反,扩张卷积采用一个比自身更大的滤波器,以步长d跳过某些输入,d也称为扩张率。因此,随着网络深度的增长,扩张操作允许卷积层扩展它们的接收域,在不需要降采样的情况下保持输入分辨率。
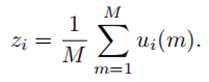
虽然堆叠时间残差模块允许TCN发现不同时间步之间的时间依赖性,但论文假设它不能充分考虑通道内的依赖性。因此,论文在每个时间残差模块之后加入了SE块。如图3(b)所示,SE块首先使用全局平均池化在时间维度上嵌入 中的信道信息。对通道
中的信道信息。对通道 建立向量
建立向量 ,其中:
,其中:
然后,在对特征图进行缩放并应用自门控机制之前,SE块以 的因子缩小特征图。这是通过两个权值为
的因子缩小特征图。这是通过两个权值为 和
和 的全连接(或密集)层实现的。该操作可以正式描述如下:
的全连接(或密集)层实现的。该操作可以正式描述如下:

式中σ(·)为sigmoid激活函数。门控输出最后与块的输入相乘以构建最终输出 ,有效地促进最有用的通道。
,有效地促进最有用的通道。
2.dropout变分推理
BTCN通过dropout近似变分推断。这对应于向每个确定性的 注入符合伯努利分布的噪声,以创建其随机对应的
注入符合伯努利分布的噪声,以创建其随机对应的 。实际中,dropout应用在每个卷积层(除输出层外)之后,断开连接的概率为pdrop。重要的是,droupout不仅在训练期间,而且在推断时启用;我们执行S个随机正向传递来获得类概率
。实际中,dropout应用在每个卷积层(除输出层外)之后,断开连接的概率为pdrop。重要的是,droupout不仅在训练期间,而且在推断时启用;我们执行S个随机正向传递来获得类概率 ,对其进行平均以产生后验分布
,对其进行平均以产生后验分布 。这个过程被称为MC dropout sampling 。
。这个过程被称为MC dropout sampling 。
3.预测不确定性量化
给定S个MC dropout样本,类概率 将其重构为
将其重构为 ,总预测不确定性可以用
,总预测不确定性可以用 的方差来近似,定义如下:
的方差来近似,定义如下:
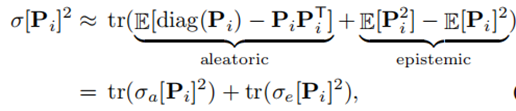
其中矩阵 和
和 分别对应任意不确定性和认知不确定性。他们在每个时间段中产生一个单一的随机认知不确定性值。
分别对应任意不确定性和认知不确定性。他们在每个时间段中产生一个单一的随机认知不确定性值。
4.分割目标函数
对于非监督轨迹分割,论文利用基于互信息的深度聚类方法,因为其在图像语义分割方面优于基于质心的聚类方法。
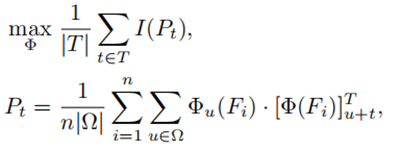
其中,Φ是一个神经网络,在这个例子中即为BTCN。Φu(Fi)是patch 的输出。该patch在输入运动特征序列Fi内以时间步长u为中心。
的输出。该patch在输入运动特征序列Fi内以时间步长u为中心。
三.实验结果
1.实验设置
本文提出的模型所对比的方法是Uniform segmentation、Heuristics-based change point detection和Optimization-based change point detection。数据集采用Geolife数据集。抽取的运动特征包括速度、加速度、加加速度、方向变化。
2.整体表现
实验结果如表1所示 BTCN持续且显著地优于所有基准方法,其最低MAE为24.7,比最好的性能基线提高了近10倍。
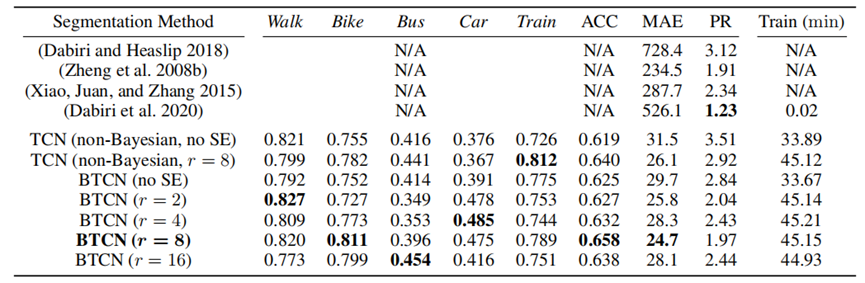
表1
3.参数分析
表2给出了评价指标和不确定度对MC样本数量S的敏感性。在这个实验中,使用了5次执行中表现最好的BTCN。虽然随着S的增加,全局精度似乎没有显著提高,但MAE下降了约19%,PR几乎减半。当S > 50(我们在整个实验中使用的值)时,没有观察到对准确性的明显改善。
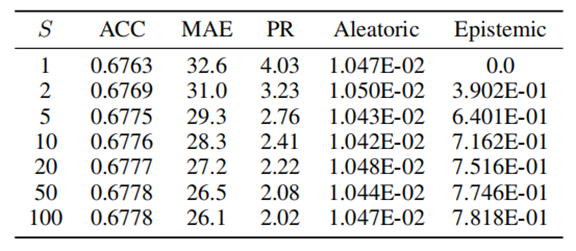
表2
对于涉及GPS轨迹分割的安全关键智能交通应用来说,模型基于一定的置信度有选择地做出时间步级预测的能力可能是有益的。图3显示了5次执行中表现最好的BTCN在不同置信百分比下的全局和每个样本精度的变化情况。在这种背景下,置信度被简单地定义为消极的任意或认知的不确定性。
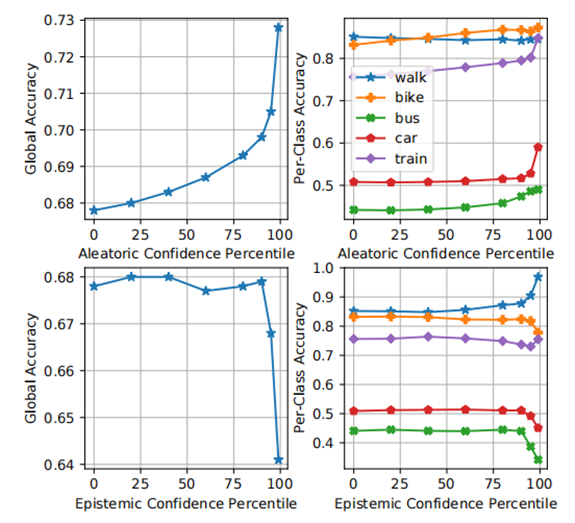
图3
在认知置信的情况下,全局准确率的提高微乎其微;在第90百分位之前几乎没有变化,然后是第95和99百分位的急剧下降。
四.总结
本文介绍了一种新的GPS轨迹分割方法,以解决相关工作在学习未标记数据和捕获预测不确定性方面的缺点。通过语义图像分割的视角来执行轨迹分割,在Microsoft的Geolife数据集上,提出的BTCN达到65.8%的时间步级精度,明显优于对比方法。
