




基于NMPC(非线性模型预测控制算法)轨迹跟踪与避障控制算法研究
仅供学习算法使用
这段代码是一个用于无人车路径跟踪的程序。下面我将对程序进行详细的分析。
YID:8770627173879012
首先,代码的前几行是一些初始化设置,包括清除变量、关闭警告、添加路径等。然后定义了一些模拟参数,如模拟时间、预测步数、时间步长等。
接下来,定义了一个地图的结构体Map,其中包含了一系列的点坐标,用于描述路径。然后调用了waypoint函数对地图进行处理。
然后,程序初始化了一些状态参数,并定义了一些权重矩阵W和WN,用于优化控制问题。
接下来,程序进入主循环,直到模拟时间达到设定的时间长度。在每次循环中,程序首先更新当前位置,并判断是否到达目标点。然后计算参考轨迹和障碍物代价,并解决非线性模型预测控制(NMPC)最优控制问题。
在NMPC求解过程中,程序使用了一个while循环来迭代求解,直到满足收敛条件或达到最大迭代次数。在每次迭代中,程序计算控制输入,并更新状态。
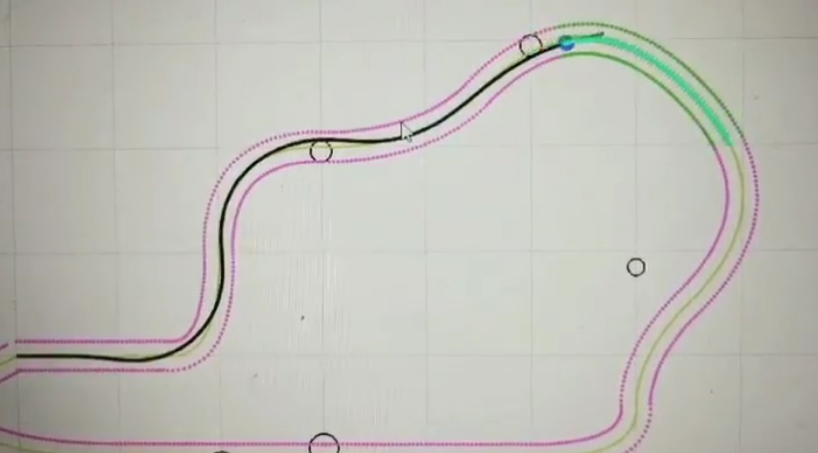
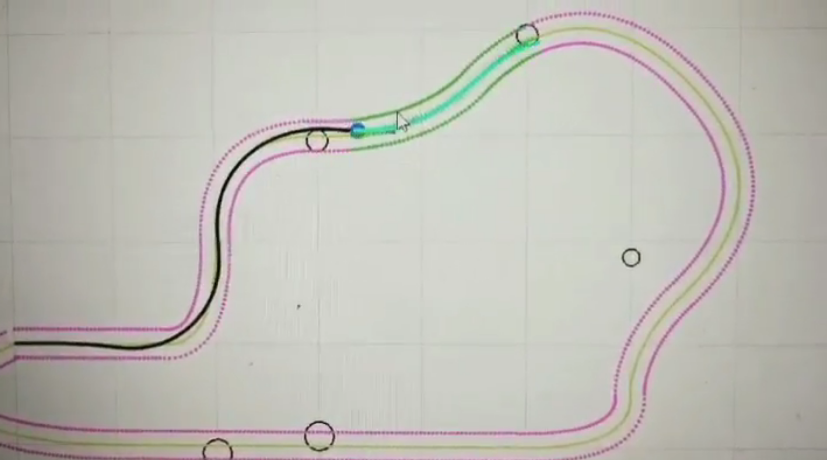
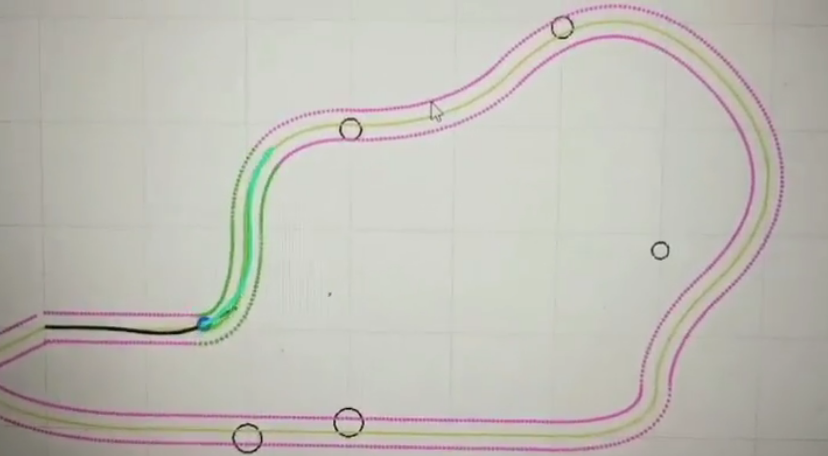
最后,程序进行可视化展示,包括绘制地图、轨迹、参考轨迹等。
总的来说,这段代码实现了一个无人车路径跟踪的功能,通过优化控制问题来实现车辆的自动驾驶。主要涉及到非线性模型预测控制(NMPC)、路径规划、状态估计等知识点。
「喜欢这篇文章,您的关注和赞赏是给作者最好的鼓励」
关注作者
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文章的来源(墨天轮),文章链接,文章作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
