




三维的组合导航。
ins和卫星的组合导航算法,基于卡尔曼滤波和eskf滤波的都有。
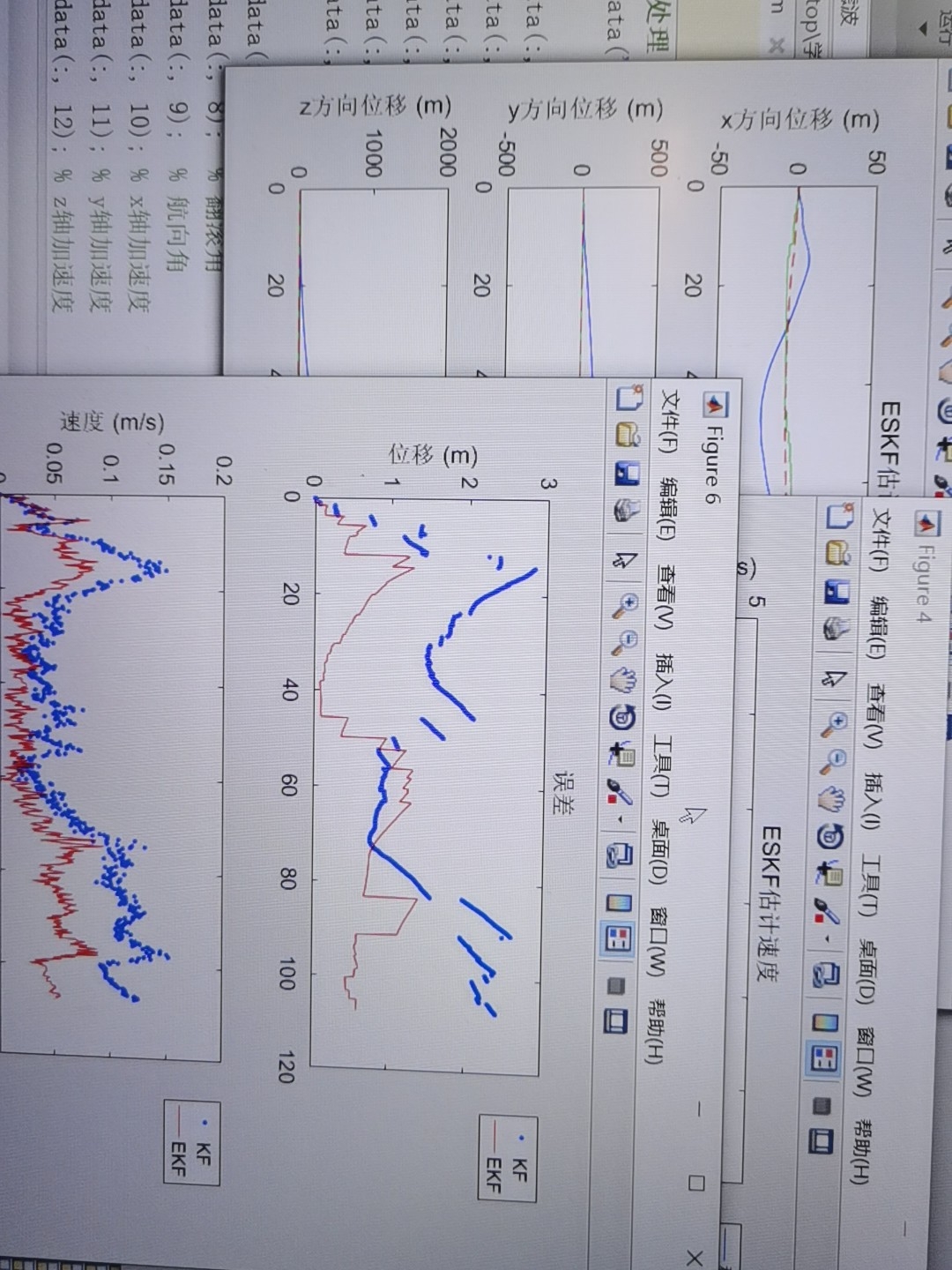
MATLAB源码,有kf和eskf的对比,也有单独的误差,或者输入滤波之后的位移速度等导航参数。
这段程序主要是一个卡尔曼滤波器,用于估计运动物体的位置和速度。它涉及到数据的读取、处理和滤波过程。
YID:6645673324929162
首先,程序通过importdata函数读取名为ceshi.txt的数据文件,并将数据存储在变量data中。
接下来,程序从data中提取出所需的数据,并将其存储在不同的变量中,如gvx、gvy、gvz等。这些变量代表了运动物体的速度和位置信息。
然后,程序对数据进行处理,计算出一些相关的量,如位移量和时间和。这些处理包括对速度和加速度进行积分,计算位移和时间和。
接下来,程序初始化一些变量,并创建一些空矩阵用于存储测量值和协方差矩阵。
然后,程序进入一个循环,从第二个数据点开始,计算一系列的矩阵和向量,包括转移矩阵、过程噪声协方差、观测矩阵等。然后,程序使用离散卡尔曼滤波公式对状态进行更新和校正,得到估计的位置和速度。
在循环的过程中,程序还计算了卡尔曼滤波器的误差,并将结果存储在一些变量中。
最后,程序绘制了一些图形来展示卡尔曼滤波器的结果,包括估计的位置和速度与测量值的比较,以及误差的分析。
此外,程序还定义了一个名为kalman的子函数,用于实现卡尔曼滤波的具体计算过程。该函数接受时间、加速度和GPS测量值作为输入,并返回估计的速度和位置。
总的来说,这段程序主要是为了通过卡尔曼滤波器来估计运动物体的位置和速度。它涉及到数据的读取、处理、滤波过程以及结果的分析和可视化。在实际应用中,这种方法可以用于航空航天、导航和自动驾驶等领域,以提高位置和速度的精确度和稳定性。
「喜欢这篇文章,您的关注和赞赏是给作者最好的鼓励」
关注作者
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文章的来源(墨天轮),文章链接,文章作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
