




PDPS---ABB机器人的定义
在激烈的市场竞争中,“后知后觉”往往会给企业带来高昂的试错成本。针对这一难题,西门子的虚拟调试技术则提供了一种“先知先觉”的思路。通过在虚拟世界中构建物理实体的“数字化双胞胎”,各行各业可以在实际生产之前就测试并验证产品方案的合理性。
下图是西门子针对不同情况所开发的软件,用于测试并检验方案的合理性。
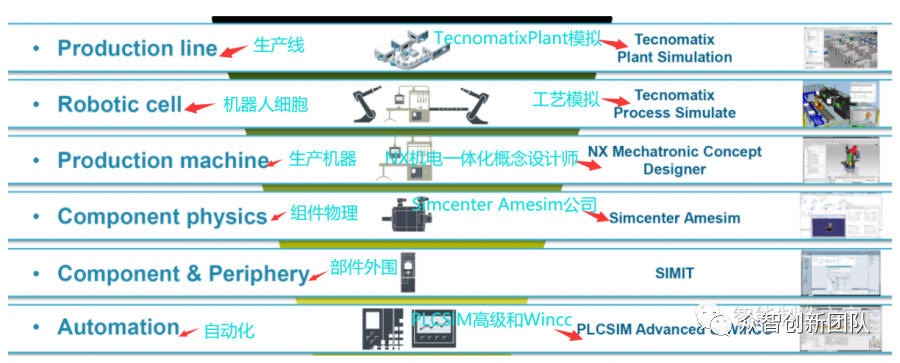
上图第二行右侧的Process Simulate(工艺模拟),用于仿真一个生产车间的运动过程。
本期,小编要讲解如何在Process Simulate中对ABB机器人进行定义。
创建运动结构
当ABB机器人导入后选择菜单栏建模﹥设置建模范围﹥运动学设备﹥运动学编辑器。
步骤一:点击创建连杆指令,如图1所示。
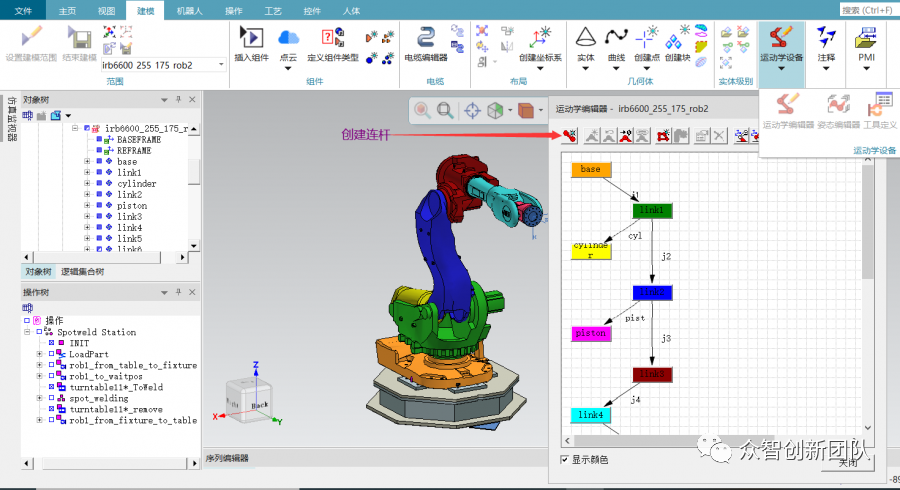
图1 菜单栏界面
步骤二:添加属于该lnk1的元素(点击元素后再点击ABB机器人的部件将结构的同一部分添加进元素下发绿色部分),如图2所示。
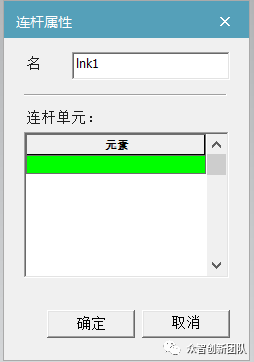
图2 连杆属性界面
连续创建后将机器人分为9个关节。
步骤三:设置关节属性,如图3所示。
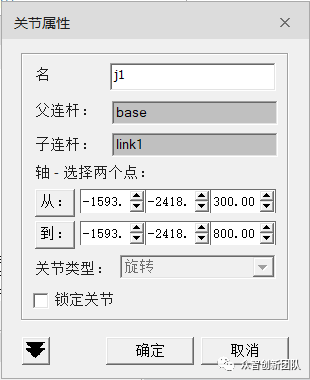
图3 关节属性界面
左键按住一个关节(父连杆)与另一关节相连(子连杆)关节类型选择旋转并创建旋转轴即从:(坐标)到:(坐标)。
注:这里有一个小技巧 可以从(坐标)与到(坐标)选取同一个点之后通过观察直接改动x,y,z坐标数。
运动的参数设置
(如图4所示)
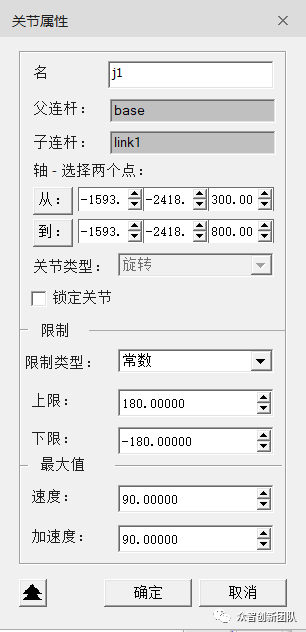
图4 参数设置
点击 在限制类型中选择常数,分别输入运动上限180 、 运动下限-180,如图所示,点击OK按钮。
在限制类型中选择常数,分别输入运动上限180 、 运动下限-180,如图所示,点击OK按钮。
运动状态的添加
步骤一:点击姿态编辑器,弹出对话框后点击新建,如图5所示。
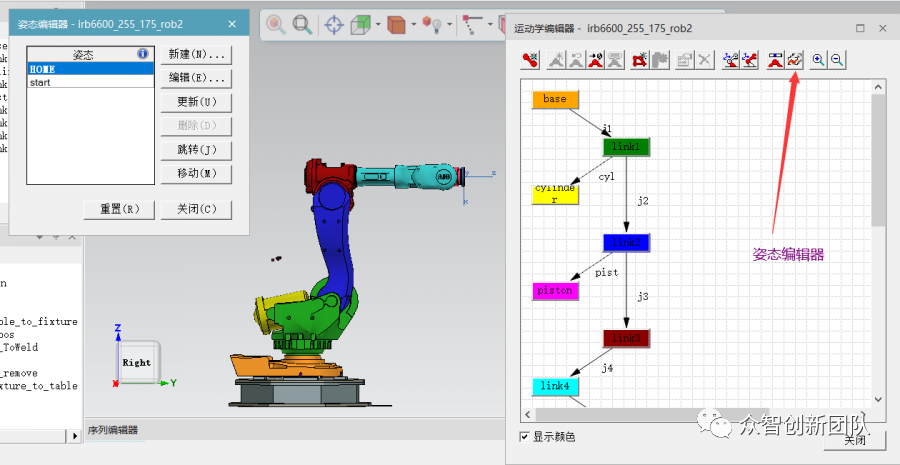
图5 运动学编辑器界面
步骤二:输入姿态名称并修改值来创建新的姿态,如图6所示。
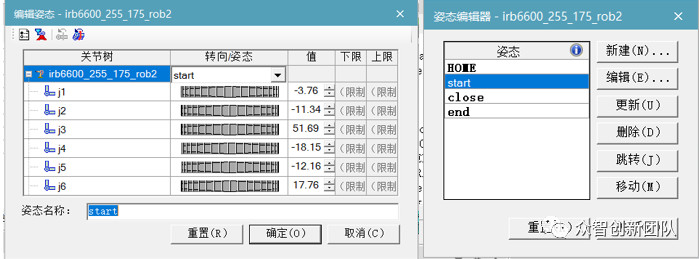
图6 姿态编辑器界面
重复上述操作建立不同姿态通过跳转、移动来改变机器人运动状态。
步骤三:建模结束,点击结束建模,如图7所示。
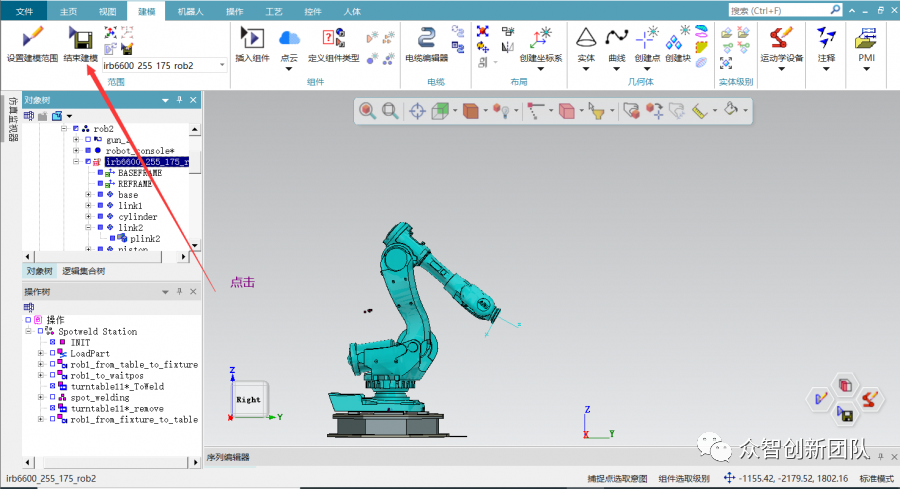
图7 建模结束界面
END
1

