




Process Simulate——带你走进机器人离线仿真世界
Process Simulate软件是西门子公司Tecnomatix数字孪生解决方案中的一款仿真软件。用于人机工程仿真、装配过程仿真和机器人离线仿真。支持多款机器人控制器,如FANUC、ABB、安川、库卡、三菱、NC、松下、UR等知名品牌。可进行多机器人、多工位的过程仿真验证。
01
主界面
(如图1所示)
图1:主界面
英文界面或许会让你不知所措,但好奇心会促使你渐渐了解并使用这些强大的功能指令,规模庞大的生产线需要耗费很多人力和物力,我们想规划工作量和时间,可在虚拟环境中早期验证生产试运行,并可通过整个离线仿真模拟现实过程。今天小编就教教大家如何实现KuKa机器人搬运板件并实现焊接操作。
02
指定文件夹
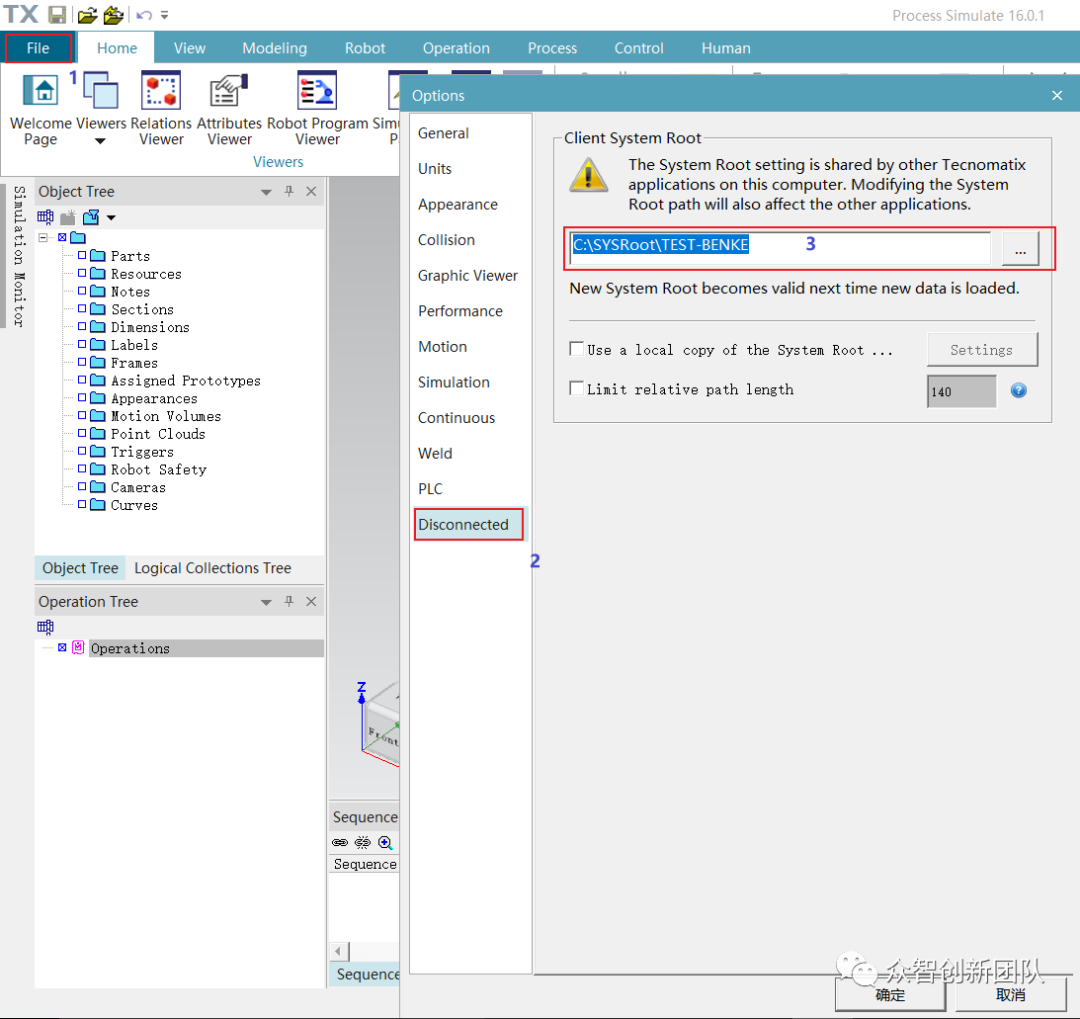
图2:在Options界面指定文件夹
03
完成布局
导入模型如下。点击移动指令可实现资源沿X、Y、Z轴方向移动相应距离并搭建布局,如图3所示。

图3:移动零件界面
04
定义资源
(如图4所示)
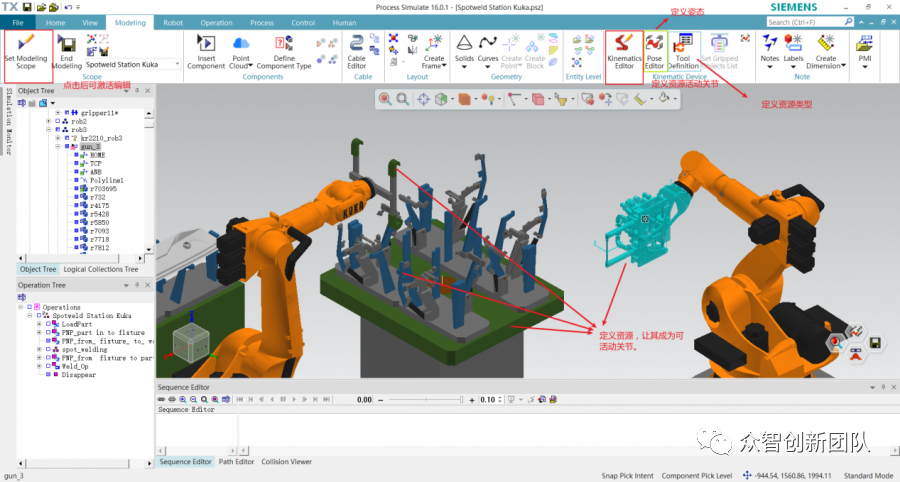
图4:定义资源界面
小编在这里只介绍一下X型焊枪的定义,如图5所示。
(1)点击Set Modeling Scope并点击确定。
(2)选中焊枪并点击Kinematics Editor。
(3)点击创建曲柄按钮。
(4)选择RPRR类型,点击下一步。
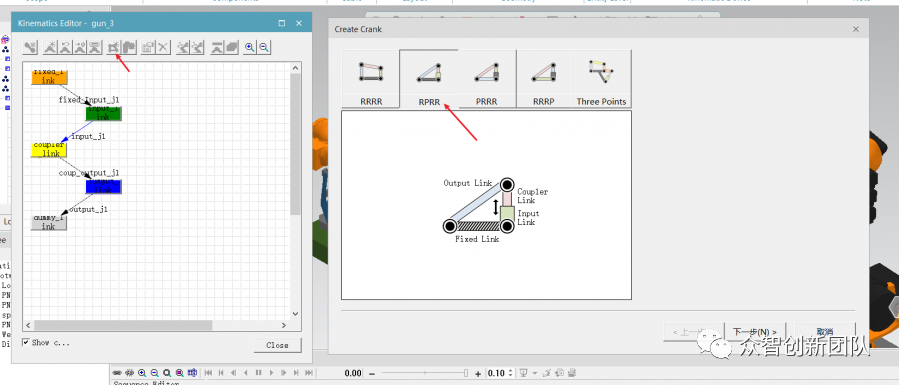
图5:创建曲柄,选择RPRR
(5)设置关节坐标,如图6所示:
①依次选择X枪的三个关节。
(如无法选择关节中心,可创建坐标系,然后选择坐标系)
②完成选择后图中会出现三条线形成一个三角形。
③在可选平面中选任意一条线(或选择一个平面)。
④视图中出现一个透明的平面,点击下一步。
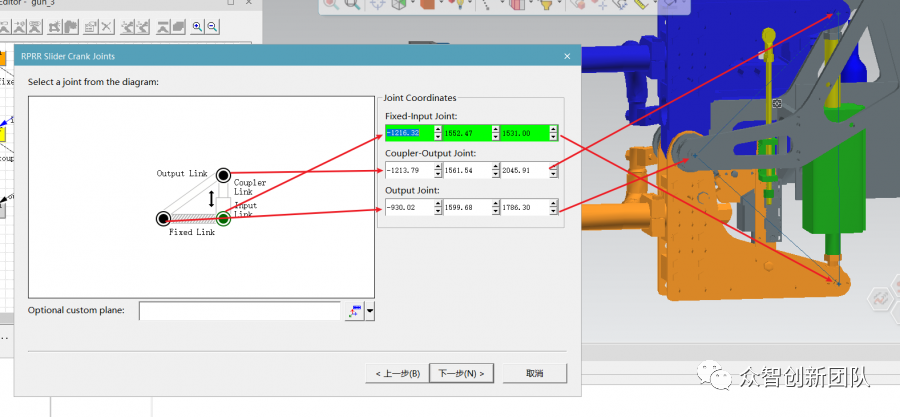
图6:选择X枪的三个关节,创建坐标
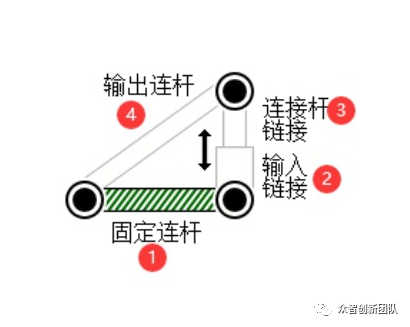
图7:选择各连杆对应的部件
完成后如下图所示,X枪连杆机构已经定义完成,可点击关节调整按钮,查看机构运动是否正确,如图8所示。
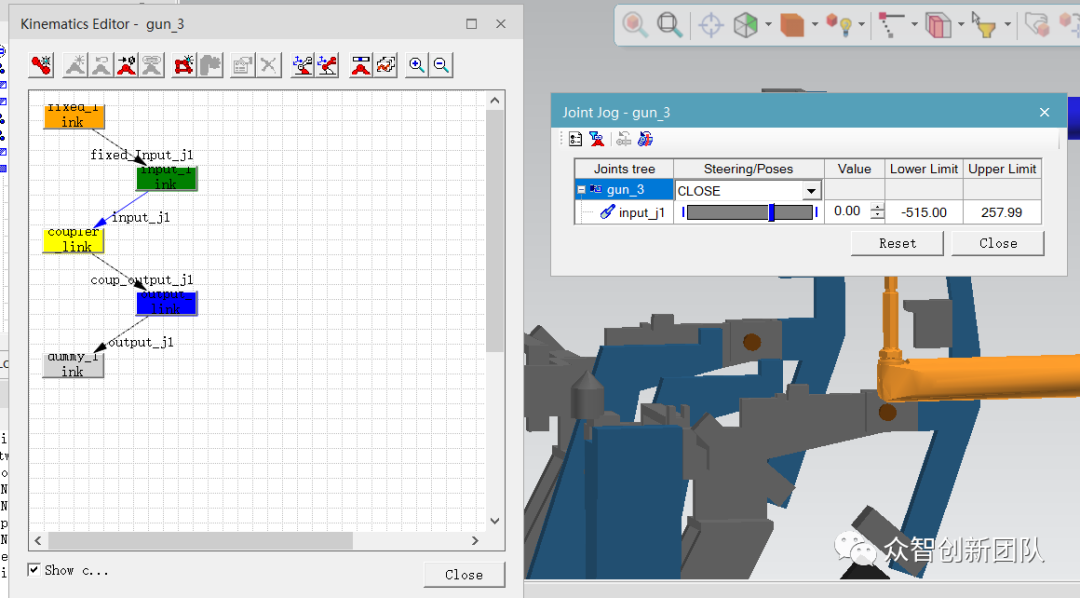
图8:机构定义完成示意图
可通过Joint Jog指令观察运动效果。
05
定义焊枪姿态 (抓手、夹具、回转台)
(如图9所示)
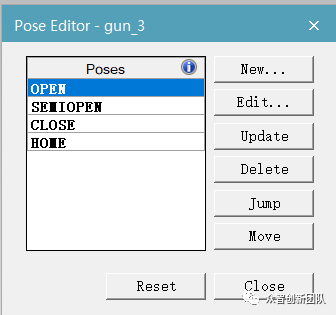
图9:姿态定义界面
06
定义工具
选中焊枪,创建TCP坐标和安装基准坐标,TCP坐标对应图中的TCP Frame,安装坐标系对应图中的Base,如图10所示。
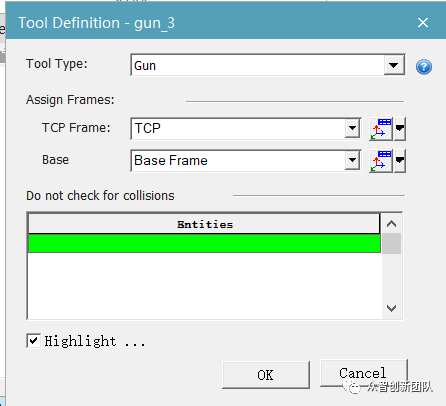
图10:创建坐标系界面
07
编辑机器人抓取指令
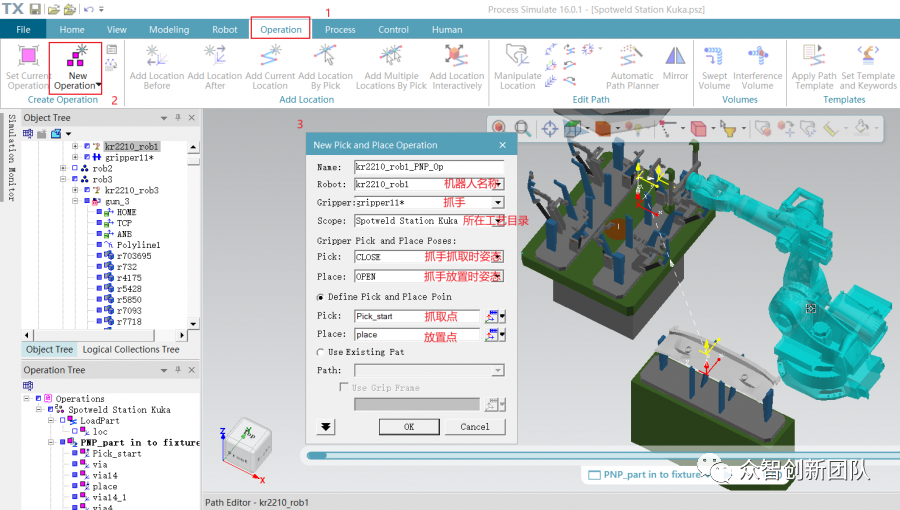
图11:机器人搬运操作
当编辑完成后,系统会自动生成运动路径,此时可能会产生干涉,为避免干涉我们需要添加一些关键点,实现完美搬运过程,操作如图12所示。
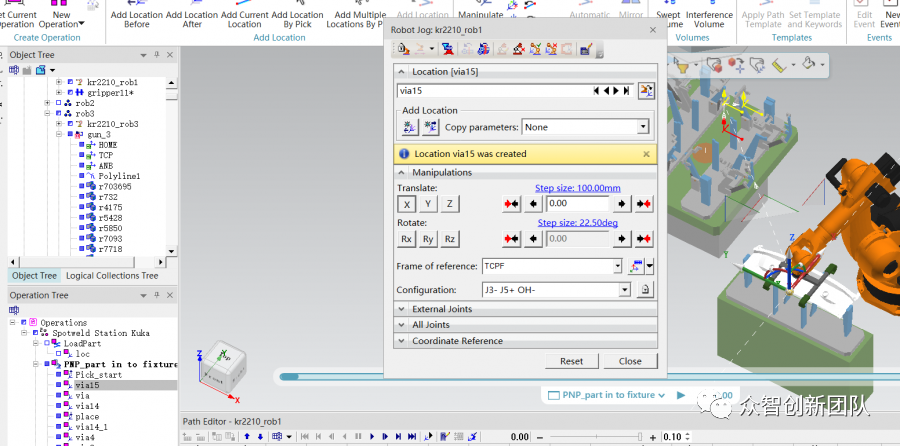
图12:添加关键点
将搬运操作添加到Path Editor,添加后会显示路径点,在路径点前后可添加关键点,右键点击选择Add Location After 或者Add Location Before,通过插入多个关键点,实现最终路径。
08
夹具夹取,回转台旋转180°
本视频展示的是机器人将零件搬运到夹具台上,夹具加紧零件后回旋台旋转180°。
09
焊点投影
(1)找到Weld选框下的Project Weld Points;选择焊点,Parts选择焊点所在零件。
(2)在Operation Tree里面选中Weld Operation之后,选择菜单栏的Weld——>Weld Distribution Center。
(3)点击Pie Chart,打开Pie Chart 窗口调整切入角,当前的切入方向位于红色区域,我们需要使这个方向旋转到蓝色区域。
(操作如图13所示)
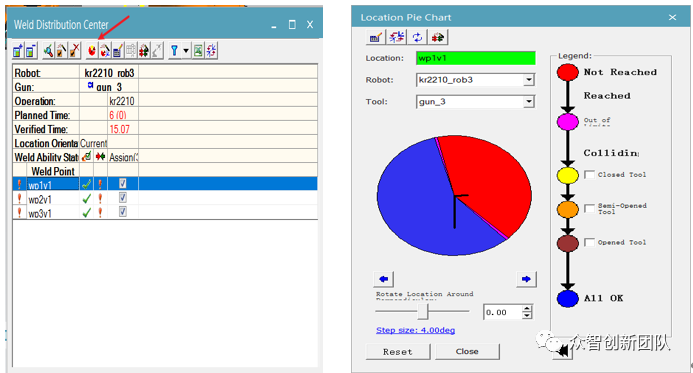
图13:Pie Chart界面
经过上述操作,我们的仿真已基本完成,感谢您的浏览,下面是离线仿真视频!

END


