




ICDE2023_Robust Attributed Graph Alignment via Joint Structure Learning and Optimal Transport_腾讯云数据库.pdf
免费下载
Robust Attributed Graph Alignment via Joint
Structure Learning and Optimal Transport
Jianheng Tang
2†
, Weiqi Zhang
2
, Jiajin Li
3
, Kangfei Zhao
4
, Fugee Tsung
1,2
, Jia Li
1,2∗
1
Hong Kong University of Science and Technology (Guangzhou),
2
Hong Kong University of Science and Technology,
3
Stanford University,
4
Tencent AI Lab
{jtangbf,wzhangcd}@connect.ust.hk, jiajinli@stanford.edu, zkf1105@gmail.com, {season,jialee}@ust.hk
Abstract—Graph alignment, which aims at identifying cor-
responding entities across multiple networks, has been widely
applied in various domains. As the graphs to be aligned are usu-
ally constructed from different sources, the inconsistency issues
of structures and features between two graphs are ubiquitous
in real-world applications. Most existing methods follow the
“embed-then-cross-compare” paradigm, which computes node
embeddings in each graph and then processes node correspon-
dences based on cross-graph embedding comparison. However,
we find these methods are unstable and sub-optimal when
structure or feature inconsistency appears. To this end, we
propose SLOTAlign, an unsupervised graph alignment frame-
work that jointly performs Structure Learning and Optimal
Transport Alignment. We convert graph alignment to an optimal
transport problem between two intra-graph matrices without the
requirement of cross-graph comparison. We further incorporate
multi-view structure learning to enhance graph representation
power and reduce the effect of structure and feature inconsistency
inherited across graphs. Moreover, an alternating scheme based
algorithm has been developed to address the joint optimization
problem in SLOTAlign, and the provable convergence result is
also established. Finally, we conduct extensive experiments on
six unsupervised graph alignment datasets and the DBP15K
knowledge graph (KG) alignment benchmark dataset. The pro-
posed SLOTAlign shows superior performance and strongest
robustness over seven unsupervised graph alignment methods
and five specialized KG alignment methods.
1
Index Terms—Graph alignment, Unsupervised learning, Struc-
ture learning, Optimal transport
I. INTRODUCTION
Graph alignment refers to the problem of identifying the
node correspondences (i.e., anchor links) across different
graphs. With graph data becoming ubiquitous in the Web
era, graph alignment establishes connections between multiple
networks and integrates them into a world-view network for
subsequent analysis and downstream applications. Thus, graph
alignment provides a comprehensive perspective for structured
data compared with mining each individual network. As a
well-established problem, graph alignment has received much
attention due to its vast applicable tasks, e.g., linking accounts
in different social network platforms [25], [26], [40], matching
entities across different knowledge graphs [34], [45], [63],
∗
Corresponding author.
†
Work done during an internship at Tencent AI Lab.
1
Code and data are released at https://github.com/squareRoot3/SLOTAlign
[69], integrating protein-protein interactions of different species
[21], [35], merging scholar profiles of academic collaboration
networks [47], [67].
Graph alignment is usually treated as a supervised problem
[33], [36], [67], [68], in which a set of ground-truth node
correspondences is given. However, these correspondences
are usually unavailable and further suffer from the labor
expensiveness issue in real-world applications. Thus, unsu-
pervised graph alignment methods have attracted increasing
attention [4], [9], [14], [17], [19], [31], [72]. Also, graph
nodes are often associated with wealthy side information,
such as the user information of social network accounts
or the embedding of knowledge graph entities. These high-
dimensional node features/attributes can serve as an additional
source of knowledge in graph alignment, especially under the
unsupervised setting.
Most existing graph alignment methods rely on high-quality
and well-measured graph structures. They require that the
structure of the overlapped parts between two graphs is similar,
which is named structure consistency thereafter. However, real-
world graphs are often coupled with outliers [46] or with
missing/irrelevant edges [28], [54], [61], leading to structure
inconsistency across graphs. It is often observed that the same
entities in different networks have quite different neighbors
due to the structural noise [4], [72]. Figure 1 demonstrates an
example of graph alignment on two social network platforms.
Black dashed lines are anchor links that connect the same copies
of users across two networks. As can be seen, two circled nodes
are connected on Platform A, but their corresponding nodes
on Platform B are not connected.
Besides structure inconsistency, another largely overlooked
issue is that node features in different graphs are usually
unaligned and inconsistent. Due to various functionalities of
different networks (e.g., LinkedIn for job seeking and Twitter
for opinion sharing), the same user in different networks
commonly does not share the same features. Taking Figure 1
as an example, user information in Platform A includes the real
name, gender, and education experiences, while Platform B
contains the anonymized username, locations, posts, etc. Under
this situation, corresponding nodes across two networks are
not similar to each other and are incomparable. Likewise, in
cross-lingual knowledge graph alignment, entities in different
arXiv:2301.12721v2 [cs.DB] 20 Apr 2023
Platform A
Structure
Inconsistency
Username
Locations
Posts
…
Platform B
Name
Gender
Education
…
Corresponding
Nodes
Feature
Inconsistency
?
Fig. 1. An example of graph alignment with structure and feature inconsistency.
languages are usually embedded into individual feature spaces.
Using machine translation [37], [44] can alleviate this issue,
but may bring additional noise and cost.
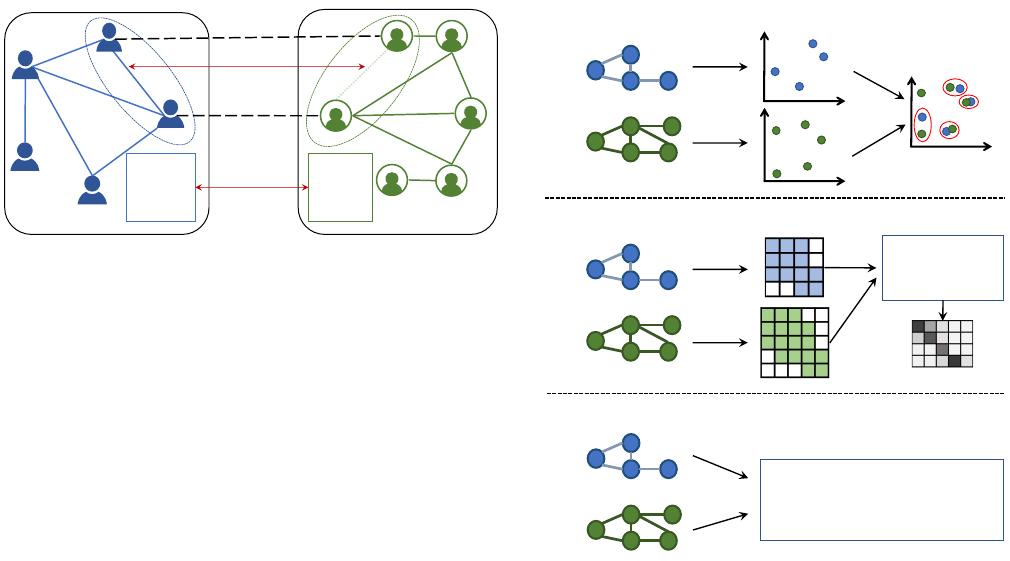
In previous works, a popular paradigm for unsupervised
graph alignment is the “embed-then-cross-compare” procedure
[4], [9], [14], [17], [23], [31], as shown in Figure 2(a).
As the name suggests, it first embeds nodes in each graph
into a common feature space (e.g., using a graph neural
network), and then compares embeddings across two graphs
to obtain node correspondences. Nonetheless, we find this
paradigm has the following limitations to deal with structure
and feature inconsistency. First, as the node embeddings are
calculated by aggregating information from the neighbors, it
may amplify noise when structure inconsistency exists. Second,
if features in two graphs are inconsistent, the corresponding
node embeddings are also typically inconsistent and can not
be compared directly [5], [14]. In knowledge graph alignment,
margin-based ranking losses [44], [45] and contrastive learning
[63] are frequently used to integrate embedding spaces across
graphs. However, without the supervision of ground-truth node
pairs, the process of embedding space integration is unstable
and unreliable.
Besides the “embed-then-cross-compare” paradigm, another
line of research is to reformulate the graph alignment problem
as finding the optimal probabilistic correspondence between
two probability measures on graphs. Specifically, Gromov-
Wasserstein (GW) distance serves as an effective tool in
modeling the correspondence problems between two graphs on
unaligned metric spaces [30], [43]. We show the procedure of
the resulting optimal transport based alignment in Figure 2(b). It
first constructs two cost matrices
D
s
and
D
t
within each graph.
Then, it applies an optimal transport solver to find the best
transportation plan
π
with minimal cost according to
D
s
and
D
t
. The transportation plan
π
reveals node correspondences
across graphs.
However, previous optimal transport based methods mainly
consider the alignment between plain graphs without attributes
and rely on manually designed cost matrices (e.g., the original
graph adjacency matrix [30], [58], [60] or the heat kernel of
graph Laplacian matrix [1], [6], [27]). Thus, these methods
are potentially fragile to structure inconsistency. Moreover,
how to find optimal cost matrices in attributed graphs for the
optimal transport based alignment has not been well explored
by existing methods. In summary, there is no satisfactory
𝓖
𝑡
𝓖
𝑠
Embed
Cross-Compare
𝓖
𝑡
𝓖
𝑠
Cost Matrix
OT Solver
𝑫
𝑠
𝑫
𝒕
min 𝑓(𝜋, 𝑫
𝑠
, 𝑫
𝒕
)
𝜋
𝓖
𝑡
𝓖
𝑠
Joint Optimization Scheme
min 𝑓(𝜋, 𝑫
𝑠
, 𝑫
𝒕
)
𝜋, 𝑫
𝑠
, 𝑫
𝒕
(a) The “Embed-Then-Cross-Compare” Alignment Paradigm
(b) Optimal Transport Based Alignment
(c) Joint Structure Learning and Optimal Transport Alignment
𝜋
Fig. 2. Comparison between the existing graph alignment methods (top and
middle) and our proposed SLOTAlign framework (bottom).
solution for enhancing the robustness of graph alignment
against structure and feature inconsistency.
To address above issues, we propose a novel framework
for joint Structure Learning and Optimal Transport Alignment
(SLOTAlign). As shown in Figure 2(c), SLOTAlign simul-
taneously optimizes the intra-graph structure representation
(
D
s
, D
t
) and cross-graph transportation plan
π
in a unified
manner, which can get rid of choosing cost matrices manually.
SLOTAlign models the multi-view structure representation
within each graph, which integrates the node-view, edge-view,
and subgraph-view to reduce the effect of noise and incon-
sistency in original graph structures. Moreover, SLOTAlign
is more robust to feature inconsistency as it only utilizes
intra-graph node relation and does not depend on cross-
graph node embedding comparison. Additionally, we show
that SLOTAlign is invariant to graph feature permutation,
which cannot be achieved by the “embed-then-cross-compare”
methods. Theoretically, we provide an alternating scheme
based algorithm to address the optimization problem arisen
from SLOTAlign, and establish the convergence result of the
proposed algorithm.
To sum up, our contributions are three-fold:
●
We point out and analyze that existing attributed graph
alignment methods are susceptible to both structure and
feature inconsistency, and thus perform unstably in noisy
real-world graphs.
●
A novel framework — SLOTAlign has been proposed for
joint structure learning and optimal transport alignment.
We prove the robustness guarantee of SLOTAlign against
2
of 14
免费下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论