




MLog: Towards Declarative In-Database Machine Learning.pdf
5墨值下载
MLog: Towards Declarative In-Database Machine Learning
Xupeng Li
†
Bin Cui
†
Yiru Chen
†
Wentao Wu
∗
Ce Zhang
‡
†
School of EECS & Key Laboratory of High Confidence Software Technologies (MOE),
Peking University {lixupeng, bin.cui, chen1ru}@pku.edu.cn
∗
Microsoft Research, Redmond wentao.wu@microsoft.com
‡
ETH Zurich ce.zhang@inf.ethz.ch
ABSTRACT
We demonstrate MLOG, a high-level language that integrates ma-
chine learning into data management systems. Unlike existing ma-
chine learning frameworks (e.g., TensorFlow, Theano, and Caffe),
MLOG is declarative, in the sense that the system manages all
data movement, data persistency, and machine-learning related op-
timizations (such as data batching) automatically. Our interactive
demonstration will show audience how this is achieved based on
the novel notion of tensoral views (TViews), which are similar
to relational views but operate over tensors with linear algebra.
With MLOG, users can succinctly specify not only simple mod-
els such as SVM (in just two lines), but also sophisticated deep
learning models that are not supported by existing in-database an-
alytics systems (e.g., MADlib, PAL, and SciDB), as a series of
cascaded TViews. Given the declarative nature of MLOG, we fur-
ther demonstrate how query/program optimization techniques can
be leveraged to translate MLOG programs into native TensorFlow
programs. The performance of the automatically generated Tensor-
Flow programs is comparable to that of hand-optimized ones.
1. INTRODUCTION
As of 2016, it is no longer easy to argue against the importance of
supporting machine learning in data systems. In fact, most modern
data management systems support certain types of machine learn-
ing and analytics. Notable examples include MADlib, SAP PAL,
MLlib, and SciDB. These systems are tightly integrated into the re-
lational data model, but treat machine learning as black-box func-
tions over relations/tensors. This results in a lack of flexibility in
the types of machine learning models that can be supported.
On the other hand, machine learning systems such as Tensor-
Flow, Theano, and Caffe are made much more expressive and flex-
ible by exposing the mathematical structure of machine learning
models to the users. However, these systems do not have a declar-
ative data management layer — it is the user’s responsibility to
deal with such tedious and often error-prone tasks as data loading,
movement, and batching in these systems.
Given these limitations, it is not surprising that higher-level ma-
chine learning libraries such as Keras have become increasingly
This work is licensed under the Creative Commons Attribution-
NonCommercial-NoDerivatives 4.0 International License. To view a copy
of this license, visit http://creativecommons.org/licenses/by-nc-nd/4.0/. For
any use beyond those covered by this license, obtain permission by emailing
info@vldb.org.
Copyright 2017 VLDB Endowment 2150-8097/17/08.
Data Model Integration
Query Language Integration
SciDB
MADlib
SAP PAL
Our
Goal
Relational Model Tensor Model
Relational
Queries
Blackbox
ML Functions
Linear Algebra
Primitives
Mathematical
Optimization
Queries
Figure 1: Schematic Comparison with Existing Systems.
popular. Given the data as a numpy array, Keras is fully declar-
ative and users only need to specify the logical dependencies be-
tween these arrays, rather than specifying how to solve the result-
ing machine learning model. However, a system like Keras does not
provide data management for these numpy arrays and it is still the
user’s responsibility to take care of low-level programming details
such as whether these arrays fit in memory, or textbook database
functionality such as reuse computation across runs or “time travel”
through training snapshots. Moreover, Keras cannot be integrated
into the standard relational database ecosystem that hosts most of
the enterprise data.
In this paper, we demonstrate MLOG, a system that aims for
marrying Keras-like declarative machine learning to SciDB-like
declarative data management. In MLOG, we build upon a standard
data model similar to SciDB, to avoid neglecting and reinventing
decades of study of data management. Our approach is to extend
the query language over the SciDB data model to allow users to
specify machine learning models in a way similar to traditional re-
lational views and relational queries. Specifically, we demonstrate
the following three main respects of MLOG:
(Declarative Query Language) We demonstrate a novel query
language based on tensoral views that has formal seman-
tics compatible with existing relational-style data models and
query languages. We also demonstrate how this language al-
lows users to specify a range of machine learning models,
including deep neural networks, very succinctly.
(Automated Query Optimization) We demonstrate how to auto-
matically compile MLOG programs into native TensorFlow
programs using textbook static analysis techniques.
(Performance) We demonstrate the performance of automatically
generated TensorFlow programs on a range of machine learn-
ing tasks. We show that the performance of these programs
is often comparable to (up to 2× slower than) manually op-
timized TensorFlow programs.
Limitations. As a preliminary demonstration of our system, the
current version of MLOG has the following limitations. First, our
ultimate goal is to fully integrate MLOG into SciDB and Post-
1933
(UFEAT, MFEAT) <- \argmin_{UFEAT, MFEAT} LOSS
>
LOSS <- \sum_{i,j} (R_{i,j} - RATINGS_{i,j})^2;
R_{i,j} <- UFEAT_{i,-} * MFEAT_{j,-}’;
>
>
create tensor MFEAT (movie, fid 1:100) -> feature;
create tensor UFEAT (user, fid 1:100) -> feature;
create tensor RATINGS(user, movie) -> rating;
>
>
>
Schema
View
Query
(1) MLog Program (2) Datalog Program
LOSS(v) :- R(i,j,v1), RATINGS(i,j,v2), v=op(i,j,v1,v2)
R(i,j,v) :- UFEAT(i,j1,v1), MFEAT(j,j2,v2), v=op(j1,v1,j2,v2)
(3.2) Executable Program
“Datalog-ify”
(3.1) Human-readable Math
Static Analysis & Optimiser
Y_{s,t} <- \sigma(Wy*H_{s,t,-});
H_{s,t,-} <- \sigma(Wh*X_{s,t,-} + Uh*H_{s,t-1,-});
>
>
create tensor Y(sent, word)-> feat;
create tensor H(sent, word, fid 1:100)-> feat;
create tensor X(sent, word, fid 1:100)-> feat;
>
>
>
Schema
View
(1) MLog Program (2) Datalog Program
H(s,t,v) :- Wh(w),X(s,t,v1),Uh(u),H(s,t-1,v2), v=op(w,v1,u,v2)
H(s,t,v) :- sent(s), t=0, v=0
(3.2) Executable Program
“Datalog-ify”
(3.1) Human-readable Math
Static Analysis & Optimiser
H_{s,0,-} <- 0;
>
create tensor ANS(sent, word)-> feat;
>
LOSS <- \sum_{i,j} (Y_{s,t} - ANS_{s,t})^2;
>
(Wh, Wy, Uh) <- \argmin_{Wh, Wy, Uh} LOSS
>
Query
create tensor Uh(fid 1:100, fid 1:100)-> feat;
create tensor Wh(fid 1:100, fid 1:100)-> feat;
>
>
create tensor Wy(fid 1:100)-> feat;
>
LOSS(v) :- Y(s,t,v1), ANS(s,t,v2), v=op(s,t,v1,v2)
Y(s,t,v) :- Wy(w),H(s,t,v1), v=op(w,v1)
(a)
(b)
(c)
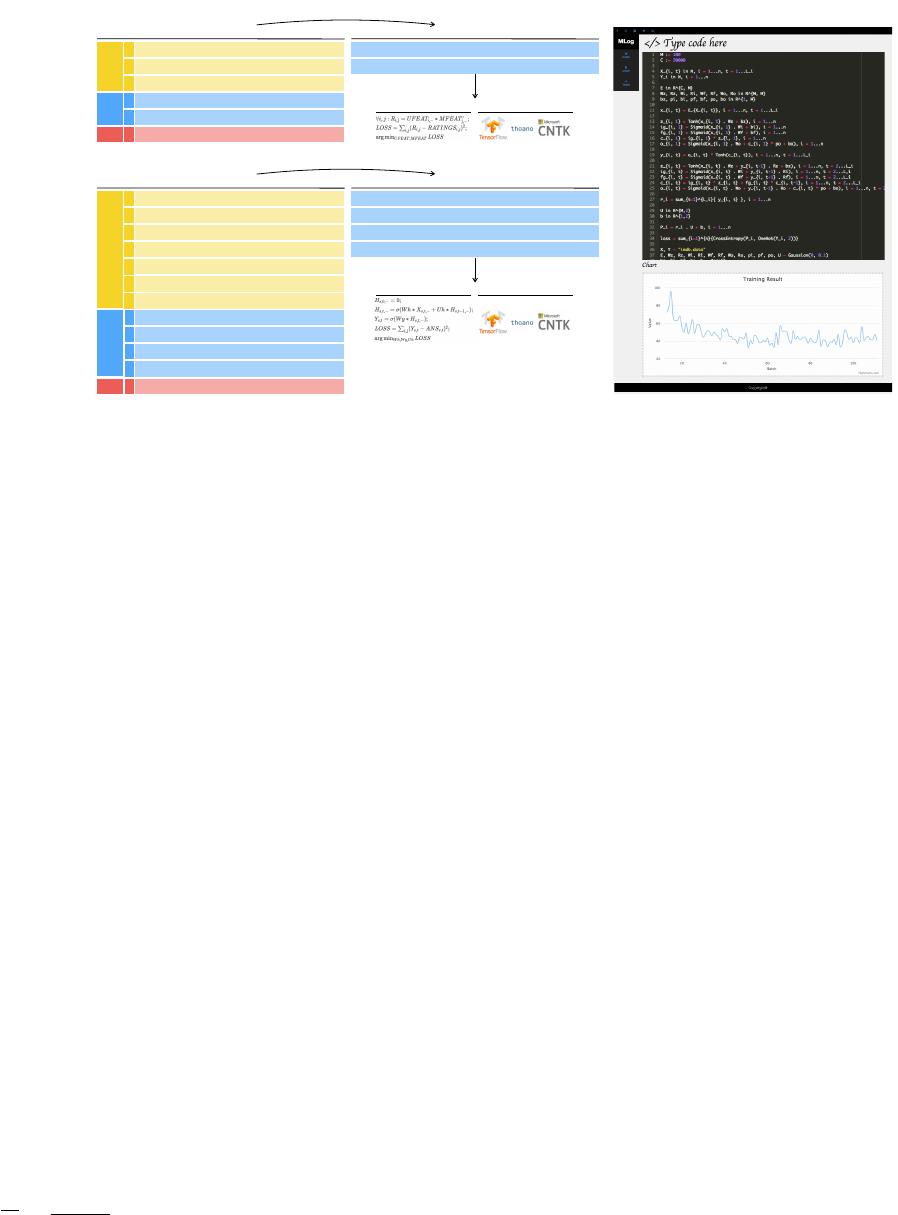
Figure 2: MLOG Examples for (a) Matrix Factorization and (b) Recurrent Neural Network. (c) User Interface of MLOG.
greSQL such that it runs on the same data representation and users
can use a mix of MLOG and SQL statements. Although our formal
model provides a principled way for this integration, this function-
ality has not been implemented yet. In this demonstration, we focus
on the machine learning component and leave the full integration
as future work. Second, the current MLOG optimizer does not con-
duct special optimizations for sparse tensors. (In fact, it does not
even know the sparsity of the tensor.) Sparse tensor optimization is
important for a range of machine learning tasks, and we will sup-
port it in the near future. Third, the current performance of MLOG
can still be up to 2× slower than hand-optimized TensorFlow pro-
grams. It is our ongoing work to add more optimization rules into
the optimizer and to build our system on a more flexible backend,
e.g. Angel [6, 5]. Despite these limitations, we believe the current
MLOG prototype can stimulate discussions with the audience about
the ongoing trend of supporting machine learning in data manage-
ment systems.
Reproducibility and Public Release. The online demo will
be up before the conference. For now, all MLOG programs, hand-
crafted TensorFlow programs, and automatically generated Tensor-
Flow programs are available at github.com/DS3Lab/MLog.
2. THE MLOG LANGUAGE
In this section, we present basics for the audience to understand
the syntax and semantics of the MLOG language.
2.1 Data Model
The data model of MLOG is based on tensors–all data in MLOG
are tensors and all operations are a subset of linear algebra over
tensors. In MLOG, the tensors are closely related to the relational
model; in fact, logically, a tensor is defined as a special type of re-
lation. Let T be a tensor of dimension dim(T ) and let the index of
each dimension j range from {1, ..., dom(T, j)}. Logically, each
tensor T corresponds to a relation RJT K with dim(T )+1 attributes
(a
1
, ..., a
dim(T )
, v), where the domain of a
j
is {1, ..., dom(T, j)}
and the domain of v is the real space R. Given a tensor T ,
RJT K = {(a
1
, ..., a
dim(T )
, v)|T [a
1
, ..., a
dim(T )
] = v},
where T [a
1
, ..., a
dim(T )
] is the tensor indexing operation that gets
the value at location (a
1
, ..., a
dim(T )
).
Algebra over Tensors. We define a simple algebra over tensors
and define its semantics with respect to RJ−K, which allows us to
tightly integrate operation over tensors into a relational database
and Spark with unified semantics. This algebra is very similar to
DataCube with extensions that support linear algebra operations.
We illustrate it with two example operators:
1. Slicing σ. The operator σ
¯x
(T ) subselects part of the input
tensor and produces a new “subtensor.” The j-th element
of ¯x, i.e., ¯x
j
∈ 2
{1,...,dom(T,j)}
, defines the subselection
on dimension j. The semantic of this operator is defined as
RJσ
¯x
(T )K =
{(a
1
, ..., a
dim(T )
, v)|a
j
∈ ¯x
j
∧(a
1
, ..., a
dim(T )
, v) ∈ RJT K}.
2. Linear algebra operators op. We support a range of linear
algebra operators, including matrix multiplication and con-
volution. These operators all have the form op(T
1
, T
2
) and
their semantics are defined as RJop(T
1
, T
2
)K =
{(a
1
, ..., a
dim(T )
, v)|op(T
1
, T
2
)[a
1
, ..., a
dim(T )
] = v}.
2.2 MLog Program
An MLOG program Π consists of a set of TRules (tensoral rules).
TRule. Each TRule is of the form
T (¯x) : −op (T
1
(¯x
1
), ..., T
n
(¯x
n
)) ,
where n ≥ 0. Similar to Datalog, we call T (¯x) the head of the
rule, and T
1
(¯x
1
), ..., T
n
(¯x
n
) the body of the rule. We call op the
operator of the rule. Each ¯x
i
and ¯x specifies a subselection that
can be used by the slicing operator σ. To simplify notation, we use
“−” to donate the whole domain of each dimension–for example,
if ¯x = (5, −), σ
¯x
(T ) returns a subtensor that contains the entire
fifth row of T . We define the forward evaluation of a TRule as the
process that takes as input the current instances of the body tensors,
and outputs an assignment for the head tensor by evaluating op.
Semantics. Similar to Datalog programs, we can define fixed-
point semantics for MLOG programs. Let I be a data instance that
contains the current result of each tensor. We define the immediate
consequence of program Π on I as S
Π
(I), which contains I and
all forward evaluation results for each TRule. The semantic of an
MLOG program is the least fixed point of S
Π
(I), i.e., S
∞
Π
(I) = I.
1934
of 4
5墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

文档被以下合辑收录
评论