




A刊TKDE 2025-Distributed_Semantic_Trajectory_Similarity_Search.pdf
免费下载
IEEE TRANSACTIONS ON KNOWLEDGE AND DATA ENGINEERING, VOL. XX, NO. XX, XXX XXXX 1
Distributed Semantic Trajectory Similarity Search
Shenghao Gong, Ziquan Fang, Liu Liu, Yaofeng Tu, Yunjun Gao, Senior Member, IEEE
Abstract—The proliferation of location-based services has
facilitated the generation of extensive semantic trajectories for
moving objects. In this paper, we investigate the problem of
semantic trajectory similarity search, a fundamental task of
trajectory analysis. The objective is to identify “similar” trajecto-
ries to a query trajectory by considering both spatial proximity
and semantic similarity. Existing studies predominantly utilize
keywords-based discrete semantic modeling, which fails to cap-
ture broader semantics, such as text descriptions. Moreover, these
studies typically develop search algorithms on a single machine,
resulting in limited processing capability.
To this end, we propose an effective framework to perform
distributed semantic trajectory similarity searches. We introduce
a novel method for representing semantic trajectories by em-
ploying both geographical sequences and semantic sequences.
This approach enhances spatial-semantic awareness in trajectory
modeling. Next, we implement the query framework in Spark
and propose a carefully designed two-phase, computation-aware
partitioning architecture. This is the first architecture to consider
both semantic and spatial aspects of trajectories, as well as
inter-trajectory distances, to guide the partitioning process. It
enables efficient pruning of most partitions in the cluster when
processing queries. Within each local partition, we construct an
ST-HNSW index to further accelerate queries. Our framework
supports three widely used trajectory distance measures: DTW,
LCSS, and EDR. Extensive experiments on two real and one
synthetic datasets demonstrate the significant advantages of our
design, achieving efficiency improvements of up to 1 to 3 orders
of magnitude over baseline and alternative approaches.
Index Terms—Trajectory Similarity Search, Distributed Com-
putation, Query Optimization
I. INTRODUCTION
W
ITH the proliferation of GPS devices, a large num-
ber of trajectories of vehicles and individuals have
been generated. Trajectory similarity search is a fundamental
functionality in trajectory databases [1]–[3], and is useful in
transportation and security fields, e.g., finding vehicles that
share similar routes to the query abnormal driving vehicle;
finding close contacts to the patient’s trajectory. Besides,
it is a fundamental operator for many downstream analy-
ses including clustering [4], pattern mining [5], and route
planning [6]. Overall, the community has devoted efforts
into spatial-aware trajectory similarity search [3], [7]–[12],
concentrating on searching for similar trajectories considering
spatial perspective.
Recently, the explosion of social networks and online maps
has augmented trajectories with semantic data [13], [14]. A
S. Gong and Z. Fang are with the School of Software Technology,
Zhejiang University, Ningbo 315048, China, E-mail: {gongshenghao, zq-
fang}@zju.edu.cn.
L. Liu and Y. Gao (Corresponding Author) are with the College of
Computer Science, Zhejiang University, Hangzhou 310027, China, E-mail:
{liu2, gaoyj}@zju.edu.cn.
Yaofeng Tu is with the ZTE Corporation, Nanjing 210012, China, E-mail:
tu.yaofeng@zte.com.cn.
Coffee
Shop
Shopping
Mall
Government
College
Western
Restaurant
Sanskirt
College
Italian
Restaurant
Grocery
College
Market
𝜏
1
𝜏
𝜏
3
Chat with friends.
Try on a dress.
Listen to a lecture.
Delicious dinner.
Buy a coffee.
Drive in a
traffic jam.
Unload the sports
equipment.
Bump into a friend.
Clothing procurement.
Cooked to
perfection.
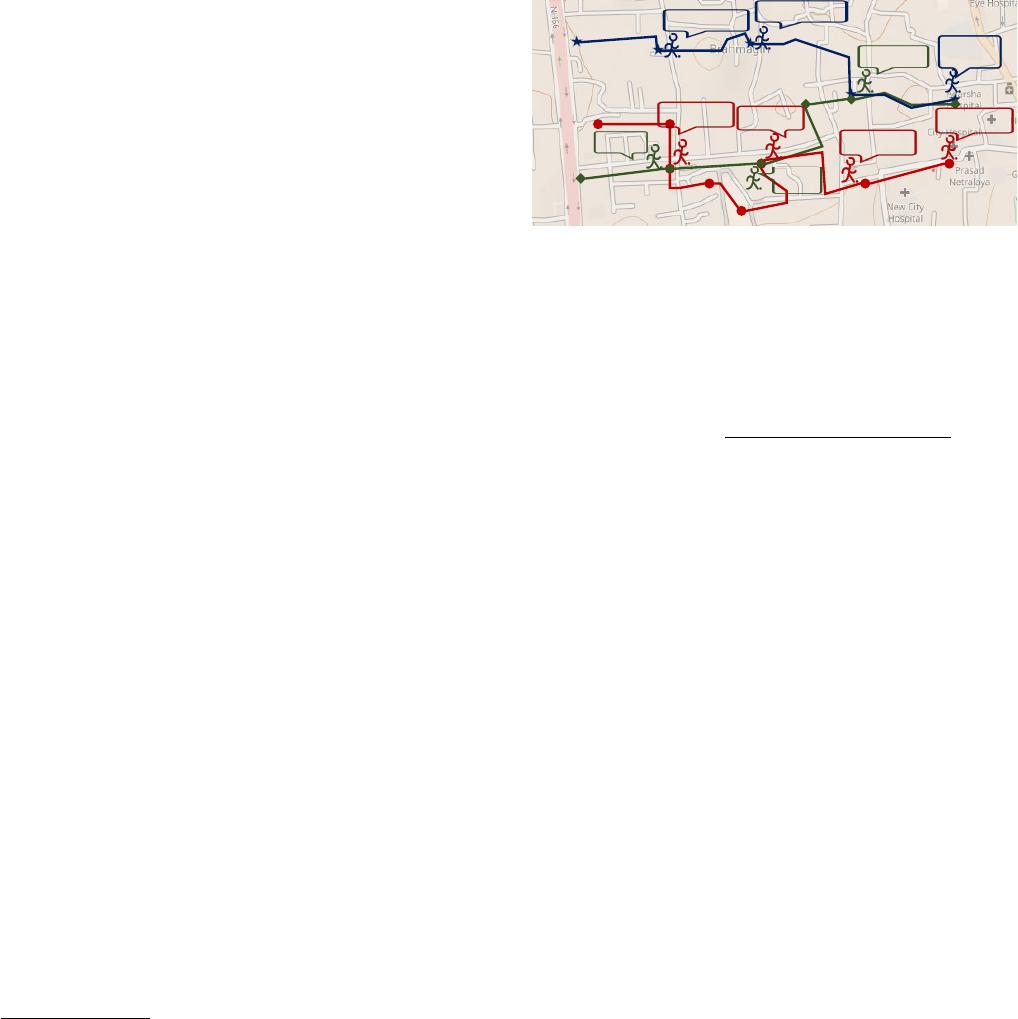
Fig. 1. A Toy Example of Three Semantic Trajectories
semantic trajectory is denoted by a sequence of locations
where each location is associated with semantic label(s) like
keywords and text descriptions. With semantic trajectories,
we can know not only where a user has been, but also
what he/she has done. In this paper, we investigate semantic
trajectory similarity search, which aims to find “similar”
trajectories considering spatial-semantic perspective. Overall,
semantic trajectory similarity search is extensively used in
online maps and social platforms like Google Maps [15] and
Foursquare [16]. There are also a multitude of semantic-based
travel planning apps, e.g., Wanderlog [17], Rome2Rio [18],
etc. Their behind idea is shown in Fig. 1, where three
trajectories exist, i.e., τ
1
–τ
3
. Although τ
1
and τ
2
are spatially
close, they express distant semantics and are thus preferred by
different groups. In contrast, τ
1
and τ
3
are semantically close
and may be recommended to the same group, like city tourists.
Consequently, it is important to consider spatial proximity and
semantic similarity when determining whether two trajectories
are similar to each other. However, when revisiting semantic
trajectory analyses [13], [14], [19]–[21], we identify three
unsolved challenges in terms of diverse semantic modeling,
scalable data processing, and query efficiency, as below.
Challenge I: How to model diverse semantic meanings?
As shown in Fig. 1, semantic trajectories exhibit diverse
meanings. For example, τ
1
records someone who chronically
“Chat with friends” at the Coffee Shop, “Try on a dress” at the
Shopping Mall, “Listen to a lecture” at the Sanskrit College,
and had dinner at the Italian Restaurant while commenting
“Delicious dinner”. As observed, two types of semantics exist,
i.e., keywords and text descriptions, where the former records
users’ locations and the latter records users’ activities. Note
that, even if τ
1
and τ
2
go through the same location, it is
possible to express different user activities. For example, τ
1
records someone who “Chat with friends” at the Coffee Shop
while τ
2
“Buy a coffee” without meeting anyone. Besides,
with the development of 5G technologies and location based
services (LBS), semantic information has become increasingly
diverse. However, existing studies [13], [19], [22] mostly
focus on keyword-based semantic modeling and cannot effec-
tively model text descriptions. In the above example, existing
This article has been accepted for publication in IEEE Transactions on Knowledge and Data Engineering. This is the author's version which has not been fully edited and
content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2025.3623108
© 2025 IEEE. All rights reserved, including rights for text and data mining and training of artificial intelligence and similar technologies. Personal use is permitted,
but republication/redistribution requires IEEE permission. See https://www.ieee.org/publications/rights/index.html for more information.
Authorized licensed use limited to: ZTE Corporation (One Dept). Downloaded on October 28,2025 at 06:50:47 UTC from IEEE Xplore. Restrictions apply.
IEEE TRANSACTIONS ON KNOWLEDGE AND DATA ENGINEERING, VOL. XX, NO. XX, XXX XXXX 2
methods directly model the activity “Chat with friends” with
discrete keywords including “Chat”, “with”, and “friends”.
Leaving aside the disruption of the semantic coherence of
sentences, we cannot enumerate all keywords. To address this
challenge, we propose a new method to model a semantic
trajectory into a geospatial sequence and a semantic sequence,
respectively. In a semantic sequence, we embed semantic texts
into vectors, capturing the rich and deep semantics. Then,
we combine the spatial and semantic similarity into a spatial-
semantic similarity metric, while supporting popular measures
including DTW [23], LCSS [24], and EDR [25].
Challenge II: How to design a scalable distributed se-
mantic trajectory similarity search framework? Compared
to raw trajectories that consist of locations, semantic trajec-
tories introduce semantic events, leading to a great increase
in data sizes. Taking the widely used trajectory datasets T-
drive [26] and GeoLife [27] as examples, enriching them with
semantics according to online map APIs [15], [28] leads to
10 × storage increase. Even worse, owing to the intricacy
involved in semantic distance computation, the calculation of
similarity between semantic trajectories entails higher com-
plexity. According to our experimental study, after incorpo-
rating semantic information into T-drive, the processing time
required for a random single query on a single machine
exceeds 2,000 seconds. As a result, semantic trajectories
may easily exceed the storage capacity and computational
capability of a single machine, necessitating a distributed
and scalable framework. However, most existing distributed
trajectory query processing approaches only support spatial-
aware distributed computation. They partition trajectory data
using methods such as IDs [29], round-robin [3], or techniques
based on separated trajectory points and Minimum Bounding
Rectangles (MBRs) [30], [31]. However, these methods are
unable to partition data based on the semantic information
of trajectories. As a result, most trajectories within the same
partition are semantically non-similar, leading to significant
redundant computation. On the other hand, existing semantic
trajectory query methods do not support large-scale distributed
processing and do not have pruning ability (i.e., partition
skipping) during partitioning. To address this challenge, we
propose a two-phase and computation-aware partitioning ar-
chitecture over Spark [32]. In contrast to existing trajec-
tory partitioning methods that typically use IDs [29], round-
robin [3], or methods based on separated trajectory points
and Minimum Bounding Rectangles (MBRs) [30], [33] to
perform direct trajectory partitioning, we leverage both the
fine-grained semantic and spatial features of trajectories, as
well as the inter-trajectory distances to enable two-phase and
computation-aware distributed partitioning.
Challenge III: How to accelerate the query process? With
the above computation-aware distributed data partitioning, the
input trajectory dataset is assigned to different partitions.
Given a query trajectory, it will be broadcast into relevant
partitions for parallel searching. This brings the idea of de-
signing an effective index in each partition for local pruning.
Existing studies typically build inverted indexes over keywords
and manage trajectories with multiple inverted files. In each
file, they build traditional trajectory indexes, including tree
indexes [34], [35] and grid indexes [36], [37]. However,
the traditional indexes cannot reduce the time complexity of
scanning a partition, but only reduce the number of evaluated
trajectories. To address this challenge, we extend the HNSW
index [38], which was proposed for vector retrieval, for
semantic trajectory similarity search. Specifically, in each data
partition, we organize trajectories into a nearest neighbor graph
by connecting trajectories that are close in spatial-semantic
distance with edges. Based on that, we build a semantic
trajectory oriented HNSW index, called ST-HNSW, where the
query starts at a node in the graph and iteratively traverses
its neighboring nodes. Besides, we also develop a series of
optimization techniques on ST-HNSW for further acceleration.
Overall, we revisit semantic trajectory similarity search
from semantic modeling, distributed partitioning, and opti-
mized query. And we make the following contributions.
• We propose an expressive semantic trajectory modeling
method. Then, we adopt a linear combination way to
calculate the spatial-semantic inter-trajectory similarities,
while supporting three trajectory distance measures.
• We build a distributed framework for semantic trajec-
tory similarity search, incorporating a novel two-phase,
computation-aware partitioning strategy, which enables
efficient query processing by allowing the pruning of
most irrelevant partitions when a query is executed.
• We develop the ST-HNSW index in each data partition for
local query acceleration. Besides, a series of optimization
techniques is designed to further speed up local queries.
• Extensive experiments on three large-scale datasets
demonstrate the effectiveness, efficiency, and scalability
of the proposed framework over competitors.
II. PRELIMINARIES
A. Problem Statement
When reviewing existing semantic trajectory representation
methods, there are individual-based forms [13], [14], [19],
[22], [39] and global-based forms [40], [41]. The definitions
of the two forms of semantic trajectory are as follows.
Definition 1. (Individual-based Semantic Trajectory) An
individual-based semantic trajectory is an ordered sequence
of points, i.e., τ = ⟨p
1
, p
2
, ..., p
n
⟩, where each point p
i
(1 ≤ i ≤ n) contains a location l
i
and an optional keyword
set K
i
. Here K
i
= {key
1
, key
2
, ...} is used to describe the
attributes of the corresponding location p
i
.
Definition 2. (Global-based Semantic Trajectory) A global-
based semantic trajectory is an ordered point sequence
associated with a description keyword set, i.e., τ =
{⟨p
1
, p
2
, ..., p
n
⟩, K
i
}, where K = {key
1
, key
2
, ...} is used to
describe the attributes of the whole trajectory.
Under the definition of semantic trajectories mentioned
above, STSS aims to find other similar trajectories in a
semantic trajectory dataset for a given query trajectory. The
definition is as follows.
Definition 3. (Semantic Trajectory Similarity Search,
STSS) Given a set of individual-based or global-based se-
mantic trajectories T , a query trajectory τ
q
, a positive integer
This article has been accepted for publication in IEEE Transactions on Knowledge and Data Engineering. This is the author's version which has not been fully edited and
content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2025.3623108
© 2025 IEEE. All rights reserved, including rights for text and data mining and training of artificial intelligence and similar technologies. Personal use is permitted,
but republication/redistribution requires IEEE permission. See https://www.ieee.org/publications/rights/index.html for more information.
Authorized licensed use limited to: ZTE Corporation (One Dept). Downloaded on October 28,2025 at 06:50:47 UTC from IEEE Xplore. Restrictions apply.
of 14
免费下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论