




Autonomous Vehicle Testing and Validation Platform Integrated Simulation System with Hardware in the Loop.pdf
50墨值下载
Autonomous Vehicle Testing and Validation Platform:
Integrated Simulation System with Hardware in the Loop*
Yu Chen
1
, Shitao Chen
2
, Tangyike Zhang
3
, Songyi Zhang
4
and Nanning Zheng
5
, Fellow, IEEE
Abstract— With the development of autonomous driving,
offline testing remains an important process allowing low-cost
and efficient validation of vehicle performance and vehicle
control algorithms in multiple virtual scenarios. This paper
aims to propose a novel simulation platform with hardware
in the loop (HiL). This platform comprises of four layers: the
vehicle simulation layer, the virtual sensors layer, the virtual
environment layer and the Electronic Control Unit (ECU)
layer for hardware control. Our platform has attained multiple
capabilities: (1) it enables the construction and simulation of
kinematic car models, various sensors and virtual testing fields;
(2) it performs a closed-loop evaluation of scene perception,
path planning, decision-making and vehicle control algorithms,
whilst also having multi-agent interaction system; (3) it further
enables rapid migrations of control and decision-making algo-
rithms from the virtual environment to real self-driving cars.
In order to verify the effectiveness of our simulation platform,
several experiments have been performed with self-defined car
models in virtual scenarios of a public road and an open parking
lot and the results are substantial.
I. INTRODUCTION
Online and offline tests are two major approaches used
in order to verify and optimize the perception and control
algorithms of self-driving cars. Motivated by the necessity
for new applicable technologies in autonomous driving,
offline testing is transforming into a mandatory step for pre-
assessment of top-level control algorithms, before the real
interface application used towards a fully matured level of
autonomous driving [1], [2], [3]. Usually on-site inspection
of physical vehicle behavior is an expensive and time-
consuming attempt that only authorizes a limited number
of scenarios to be tested. By contrast, a simulation test of
vehicle control using mounted sensors and comprehensive
environments provides a reasonable and cost-effective op-
tion. Besides, previous research and experiments on various
intelligent algorithms involved in autonomous driving, in
order to achieve optimal validation results and objective
performance analysis, require an efficient test and validation
platform. Therefore, an efficient simulation platform with
an organized architecture has been proposed, of which the
detailed workflow is shown in Fig. 1. This proposed platform
*This research was partially supported by the National Natural Science
Foundation of China (No. 61773312, 61790563), the Programme of Intro-
ducing Talents of Discipline to University (No. B13043).
Yu Chen
1
, Shitao Chen
2
, Tangyike Zhang
3
, Songyi Zhang
4
are with Institute of Artificial Intelligence and Robotics
in Xi’an Jiaotong University, Xi’an, Shannxi, P.R.China
e-mail:{alan19960212, chenshitao, ericzhang,
zhangsongyi}@stu.xjtu.edu.cn
Nanning Zheng
5
is the director of Institute of Artificial Intelligence
and Robotics, Xi’an Jiaotong University, Xi’an, Shannxi, P.R.China
Correspondence: nnzheng@mail.xjtu.edu.cn
contains a software simulation interface and a hardware ECU
interface which have been combined to form a closed test
and validation loop with high efficiency. For one thing, the
software simulation interface mainly consists of 3 layers:
(1) the kinematic vehicle designing layer for vehicle motion
control, (2) the multiple sensors’ simulation layer to percept
environments and assemble data for autonomous vehicles,
(3)the virtual testing environment layer to simulate real
scenarios and also extreme testing situations. Furthermore,
the hardware ECU interface contains an essential electronic
control unit layer for the overall hardware control.
The software simulation interface comprises a variety of
softwares which can simulate any of the required objects to
be evaluated on a virtual test bed. The software simulation in-
terface of the proposed platform is centered around the Robot
Operating System (ROS) and its embedded software Gazebo
[4], [5]. ROS is a robotic software platform that provides sim-
ilar operating system functions for heterogeneous computer
clusters. It offers customary operating system services such
as hardware abstraction, underlying device control, common
feature implementation, inter-process messaging and packet
management. A node is the core component of ROS graph
architecture. It’s usually a short piece of code scripted in
programming language Python or C ++ to perform a rela-
tively simple task or process. Multiple nodes communicate
messages to each other and can be independently started or
terminated. Therefore, nodes at different points of a process
can accept, publish, and aggregate various categories of
information for sensing, controlling, status monitoring or any
other specific purpose. Further to this, Gazebo is a ROS built-
in 3D simulation software that helps to accurately construct
and evaluate the kinematics of robots in complex indoor
and outdoor environments. It offers high-fidelity physical
simulations, a large set of sensors, and numerous procedural
and user-facing interfaces.
Further to the software simulation interface, a hardware
ECU interface [6] based on HiL simulation system has been
developed. Common offline tests merely tend to evaluate
independent algorithm modules or functions, making it prob-
lematic to easily establish the link between the real car
and the virtual environment easily. However, in this paper
the HiL system is one kind of semi-simulation system with
actual controllers but virtual objects and environments [7],
[8], [9]. Real sensors and loads are replaced by virtual
ones to simulate the real-time physical relationship between
actuators and sensors on a simulated car model [10]. This
subsequently allows the ECU to operate in an electrical
environment that is considerably close to that in a real
2018 IEEE Intelligent Vehicles Symposium (IV)
Changshu, Suzhou, China, June 26-30, 2018
978-1-5386-4451-5/18/$31.00 ©2018 IEEE 949
Real Sensor
Data
Simulated Mtiple Sensors
Vehicle Ki Model
Constructed Simulation Scenario
Embedded Actuator
Control Plugins
Simulation Software Stack
Ultrasound
LiDAR Point Cloud
Localization
Camera Images
Sensor Signals
Speed
Steering
Fuel Percentage
Simulated Scenario
Self-driving
Platform
Core Algorithms
Sensor Fusion
Driving Policy
Perception
Path Planning
ECU
Control Algorithms
Rule Compliance
Vehicle Hardware
CAN
Message
Hardware-in-the-loop Simulation
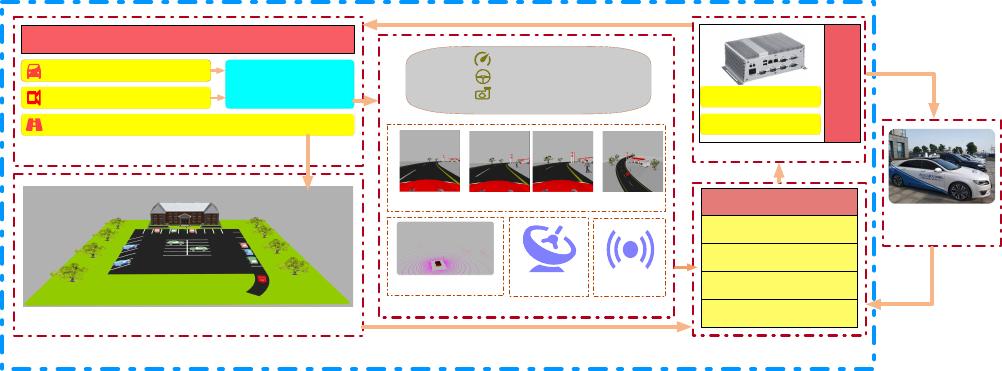
Fig. 1. Workflow of our HiL-based autonomous vehicle simulation platform. The simulation interface exports sensor signals and vehicle states to a
hardware control unit. Sensor data comes from virtual sensors like LiDAR (Light Detection and Ranging), camera, millimeter radar and all other sensor
devices. Vehicle states include throttle, brake, steering and fuel percentage reports for top-level control of ECU. The ECU then processes the transformed
data with core algorithms and sends corresponding actuator commands to a lower simulation interface after making real-time decisions.
vehicle and performs a series of tests to verify whether
its performance meets our design requirements. In terms of
safety, feasibility and reasonable cost, the HiL simulation
test has become an integral aspect of autonomous driving
development flow, reducing the number of real road tests,
shortening the development time, minimizing the cost and
improving the quality of ECU development.
In this paper, the ECU being tested is connected to the
simulation interface for all-round and systematic tests while
realizing a closed-loop simulation system. The simulation
interface exports sensor signals and vehicle states in real-
time to the ECU via CAN (Controller Area Network) bus
devices for data transmission. Then the ECU monitors and
receives all of the data for further management with core
algorithms. Finally, actuator commands for the vehicle are
directed towards the simulation interface for further vehicle
motion control tests. This system can not only evaluate
the environment perception module of a self-driving car,
but can also carry out further evaluations of path plan-
ning, decision-making and vehicle control algorithms of
autonomous vehicles [11]. Thenceforth, once the algorithms
have succeeded the feasibility and robustness assessments in
a virtual environment, they can be swiftly migrated to a real
autonomous platform for minimum error reporting in actual
testing conditions. The workflow of autonomous vehicle
development guaranties the quality and robustness of our
working platform whilst also avoiding massive unnecessary
systematic problems, and furthermore, offering a functional
development platform in a closed loop. This paper aims
to start with some related research works, following by an
introduction to our general platform. Then we’ll proceed
to the realization of detailed layers. Following this, we’ll
verify the effectiveness of our platform with experiments
of planning and decision-making algorithms. Lastly, we’ll
summarize and look ahead to our future work.
II. RELATED WORK
The offline simulation approach is now widely recognized
and applied to automotive systems thanks to its high effi-
ciency and low cost. Multiple modules utilize this approach
in order to develop and evaluate autonomous softwares with-
out the need for an actual car [12], [13], [14]. Meanwhile,
plenty of work has been conducted around HiL systems in
order to optimize offline test results and improve the control
ability, as is indicated in [6]. [15] evaluated their car’s engine
control with simulated combustion engine in a closed loop.
In [16], Oh et al. concluded that the HiL system is efficient
for vehicle dynamic component testing. However, achieving
flexible simulation interface requires various powerful offline
test softwares. Technically, these softwares can be divided
into two varieties: one aims to test the performance of an
autonomous vehicle’s different parts with real data playback.
The other one is mainly used for initial development of
control and planning algorithms. It is based on synthetic data
simulation of vehicle model, sensors and the environment.
For this paper we have chosen Gazebo for its precise kine-
matic modelling and advanced 3D rendering. Similar open-
source softwares like Euro Truck Simulator 2 and The Open
Racing Car Simulator (TORCS) [17] are frequently used
for training and strengthening control algorithms. Udacity
also opened its autonomous vehicle simulator to the public
recently. Those interested can use this simulator to learn how
to drive a car with deep learning. Apart from applications
on research work, there are also simulation softwares for
commercial purposes of automotive industry, like CarSim
for vehicle dynamics [18], PanoSim for complex vehicle
models and traffic scenarios, PreScan for Advanced Driver
Assistance Systems (ADAS) [19] development as well as
vehicle-to-vehicle (V2V) [20] and vehicle-to-infrastructure
(V2I) [21] applications. From training to testing, all these
simulation platforms are making the idea of autopilot more
950
of 8
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论