




Planecell Representing Structural Space with Plane Elements.pdf
50墨值下载
Planecell: Representing Structural Space with Plane Elements
Lei Fan
1,2
, Long Chen
2
, Kai Huang
2
and Dongpu Cao
3
Abstract— Reconstruction based on the stereo camera has
received considerable attention recently, but two particular
challenges still remain. The first concerns the need to present
and compress data in an effective way, and the second is to
maintain as much of the available information as possible
while ensuring sufficient accuracy. To overcome these issues,
we propose a new 3D representation method, namely, planecell,
that extracts planarity from the depth-assisted image segmen-
tation and then directly projects these depth planes into the
3D world. The proposed method demonstrates its advancement
especially dealing with large-scale structural environment, such
as autonomous driving scene. The reconstruction result of our
method achieves equal accuracy compared to dense point clouds
and compresses the output file 200 times. To further obtain
global surfaces, an energy function formulated from Condi-
tional Random Field that generalizes the planar relationships
is maximized. We evaluate our method with reconstruction
baselines on the KITTI outdoor scene dataset, and the results
indicate the superiorities compared to other 3D space repre-
sentation methods in accuracy, memory requirements and the
scope of applications.
I. INTRODUCTION
3D reconstruction has been an active research area in
the computer vision community, which can be used in
numerous tasks, such as perception and navigation of intelli-
gent robotics, high precision mapping, and online modeling.
Among various sensors that can be used for reconstruc-
tion, stereos cameras are popular for offering advantages in
terms of being low-cost and supplying color information.
Many researchers have improved the precision and speed of
self-positioning and depth calculation algorithms to enable
better reconstruction. However, the basic map representa-
tion method determines the upper bound of reconstruction
performance to some extent. Current approaches including
point clouds, voxel-based or piece-wise planar methods are
confronted with problems dealing massive stereo image
sequences, such as significant redundancy, ambiguities and
high memory requirements. To overcome these limitations,
we propose a new representation method named planecell,
which models planes to deliver geometric information in the
3D space.
It is a classical approach to representing the 3D space
with a preliminary point-level map. The point-based repre-
This work was supported in part by the National Natural Science
Foundation of China under Grant 61773414.
1
Lei Fan is with the Vehicle Intelligence Pioneers Inc., Qingdao Shan-
dong 266109, P.R.China chenl46@mail.sysu.edu.cn
2
Lei Fan, Long Chen and Huang kai are with School of Data and Com-
puter Science, Sun Yat-sen University, Guangzhou, Guangdong, P.R.China.
chenl46@mail.sysu.edu.cn
3
Dongpu Cao is with Department of Mechanical and Mechatronics
Engineering, University of Waterloo, 200 university avenue west, Waterloo,
Ontario N2L3G1, Canada. dongpu@uwaterloo.ca
sentations usually suffer a tradeoff of density and efficiency.
Many approaches [17], [1], [14] have been developed to
address this issue, i.e., to merge similar points in the 3D
reconstruction results for both indoor and outdoor scenes.
The current leading representation method, called the voxel
map [2], [22], [17], [20], is designed to give each voxel
grid an occupancy probability, and then aggregates all points
within a fixed range. However, dense reconstructions using
regular voxel grids are limited to reach small volumes
because of their memory requirements.
Previous studies have adopted the plane prior both in
stereo matching [23] and reconstruction [17], [18], [10],
[3]. Deriving primitives in the model raises the complex-
ity, which restricts further applications. The structure-from-
motion method [3] presented the urban scene with planes
underlying sparse data. Superpixels or image segmentation
methods have been applied in the representation [4] as basic
components. Combined with meshes and smoothing terms, it
achieves good results on large-scale scenes. Although these
methods can reconstruct the scene in a dense and light-
weight approach, the accuracy and time-consumption are still
unsatisfactory.
In this paper, we propose a novel approach that differs
by mapping the 3D space with basic plane units directly
extracting from 2D images, which is called planecell for
it resembles cells to a living being. The proposed method
utilizes a general function to represent a group of points with
similar geometric information, i.e., belong to the same plane
by a depth-aware superpixel segmentation, and these planes
are projected into the real-world coordinates after plane-
fitting with depth values. The standardized representation
promotes memory efficiency and provides convenience for
following computations, such as large surface segmentation
and distance calculation. Our method extracts planecells from
images by superpixelizing the input image following the
hierarchical strategy of SEEDS [19] and converts them into
a 3D map. Further aggregation of planecells to a larger
surface is modeled by a Conditional Random Field (CRF)
formulation. The proposed representation is motivated by the
planar nature of the environment. The input to our method
is stereo pairs, and the output is a plane-based 3D map with
decent pixel-wise precision and high compression rate. Note
the depth acquirement is not specified, e.g. stereo matching
algorithms, LiDAR or RGB-D sensors can also be used.
The detailed contributions of this paper are as follows:
(a) We propose a novel plane-based 3D map representa-
tion method that demonstrates remarkable accuracy and has
enhanced the space perception abilities. (b) The proposed
method reduces the required memory of presenting large-
2018 IEEE Intelligent Vehicles Symposium (IV)
Changshu, Suzhou, China, June 26-30, 2018
978-1-5386-4451-5/18/$31.00 ©2018 IEEE 978
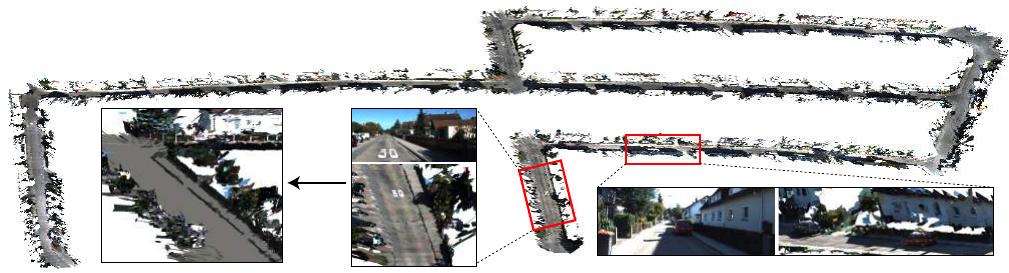
Road extraction after coplanar planecell aggregation
Frames: 2000 continuous stereo pairs from the KITTI odometry dataset
Time: 411s
Map Size: 89.1MB
Map details
Input image
Input image
Fig. 1. The map reconstructed by proposed method. The result shows three advantages: (a) the ability of dealing with large-scale reconstruction; (b) the
low-loss of accuracy (detailed quantitative evaluation is processed on KITTI stereo dataset compared to ground truth); (c) the low requirements of both
time and memory.
scale maps with innovative superpixel segmentation. (c) The
expansibility and efficiency of our representation method
are studied in applications include but not limited to road
extraction and obstacle avoidance in the experiment. In
practice, this objective can be optimized on a single core in
as little as 0.2 seconds for about 700 planecells. To further
aggregate coplanar planes requires only 0.1s per frame. The
remainder of this paper is organized as follows: Section II
briefly reviews the related literature. The overview of the
proposed method is introduced in Section III. The detail of
our method is explained in Section IV. In Section V, we
demonstrate the 3D representation. The experimental results
are conducted in Section VI. In Section VII, we conclude
this paper.
II. RELATED WORK
Basic 3D map representation methods using an image pair
are inheritors of various stereo matching algorithms [23],
[15], [24]. Point-based 3D reconstruction methods directly
transforming stereo matching results lack structural repre-
sentations. Recent point-level online scanning [25] produces
a high-quality 3D model of small objects with the geometric
surface prior, which is simpler to operate than strong shape
assumptions. For large-scale reconstructions, sparse point-
based representations are mainly used for their quality and
speed. The point-based maps embedded in the system [8]
is designed for real-time applications, such as localization.
Adopting denser point clouds in the mapping is challenging
because it involves managing millions of discrete values.
The heightmap is a representation adopting 2.5D contin-
uous surface representations, which shows its advancement
modeling large buildings and floors. Gallup et al. proposed
an n-layer heightmap [11] to support more complex 3D
reconstruction of urban scenes. The proposed heightmap
enforced vertical surfaces and avoided major limitations
when reconstructing overhanging structures. The basic unit
of heightmap is the probability occupancy grid computed by
the bayesian inference, which could compress surface data
efficiently but is also lossy of point-level precision.
Recent studies on voxelized 3D reconstruction focus on
infusing primitives into the reconstructions [16], [17], [9],
[5] or utilizing scalable data structures to meet CPU require-
ments [20]. Dame et al. proposed a formulation [6] which
combines shape priors-based tracking and reconstruction.
The map was represented as voxels with two parameters in-
cluding the distance to the closest surface and the confidence
value. Nonetheless, the accuracy of volumetric reconstruction
is always limited to itself, and re-estimating object surfaces
from voxels or 3D grids leads to ambiguities.
Planar nature assumptions have been applied to both the
reconstruction [10], [4] and depth recovery from a stereo
pair [23], [21]. For surface reconstruction or segmentation,
Liu et al. [16] partitioned the large-scale environment into
structural surfaces including planes, cylinders, and spheres
using a higher-order CRF. A bottom-up progressive approach
is adopted alternately on the input mesh with high geomet-
rical and topological noises. Adopting this assumption, we
present a new representation method of 3D space, which is
composed of planes with pixel-level accuracy.
III. SYSTEM OVERVIEW
As shown in Fig. 2, the input to the system is a com-
bination of the stereo image. The disparity map is pre-
calculated with stereo matching algorithms. We use a depth-
aware superpixel segmentation method with an additional
depth term. A hill-climbing [19] superpixel segmentation
method is applied to the color image with a regularization
term to reduce the complexity. Sparse depth results produced
by fast matching algorithms can still be the input, as we
utilize random sampling to omit the effect of outliers during
plane-fitting. The boundaries of the segmentation are further
updated after plane functions have been assigned to each
segment. The superpixels are the basic elements of the
mapping process. We extract the vertices of each plane
and then convert them into the camera coordinate system.
For existing 3D planes, we aggregate those whose spatial
relationship are planarity while minimizing the total energy
function.
979
of 8
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论