




Probabilistic Prediction of Vehicle Semantic Intention and Motion.pdf
50墨值下载
Probabilistic Prediction of Vehicle Semantic Intention and Motion
Yeping Hu, Wei Zhan and Masayoshi Tomizuka
Abstract— Accurately predicting the possible behaviors of
traffic participants is an essential capability for future au-
tonomous vehicles. The majority of current researches fix the
number of driving intentions by considering only a specific
scenario. However, distinct driving environments usually con-
tain various possible driving maneuvers. Therefore, a intention
prediction method that can adapt to different traffic scenarios
is needed. To further improve the overall vehicle prediction
performance, motion information is usually incorporated with
classified intentions. As suggested in some literature, the meth-
ods that directly predict possible goal locations can achieve
better performance for long-term motion prediction than other
approaches due to their automatic incorporation of environment
constraints. Moreover, by obtaining the temporal information of
the predicted destinations, the optimal trajectories for predicted
vehicles as well as the desirable path for ego autonomous vehicle
could be easily generated. In this paper, we propose a Semantic-
based Intention and Motion Prediction (SIMP) method, which
can be adapted to any driving scenarios by using semantic-
defined vehicle behaviors. It utilizes a probabilistic framework
based on deep neural network to estimate the intentions,
final locations, and the corresponding time information for
surrounding vehicles. An exemplar real-world scenario was
used to implement and examine the proposed method.
I. INTRODUCTION
Safety is the most fundamental aspect to consider for both
human drivers and autonomous vehicles. Human drivers are
capable of using past experience and intuitions to avoid
potential accidents by predicting the behaviors of other
drivers. However, some drivers have poor driving habits such
as changing lanes without using turn signals, which adds dif-
ficulties for prediction. Moreover, human drivers might easily
overlook dangerous situations due to limited concentration.
Therefore, the Advanced Driver Assistance Systems (ADAS)
should have the ability to simultaneously and accurately
anticipate future behaviors of multiple traffic participants
under various driving scenarios, which may then assure a
safe, comfortable and cooperative driving experience.
There have been numerous works focused on predicting
vehicle behavior which can be divided into two categories:
intention/maneuver prediction and motion prediction.
Many intention estimation problems have been solved by us-
ing classification strategies, such as Support Vector Machine
(SVM) [1], Bayesian classifier [2], Multilayer Perceptron
(MLP) [3], and Hidden Markov Models (HMMs) [4]. Most
of these approaches were only designed for one particular
scenario associated with limited intentions. For example,
[1]-[3] dealt with non-junction segment such as highway,
*This work was supported by Berkeley DeepDrive (BDD).
Y. Hu, W. Zhan and M. Tomizuka are with the Department of Me-
chanical Engineering, University of California, Berkeley, CA 94720 USA
[yeping
hu, wzhan, tomizuka@berkeley.edu]
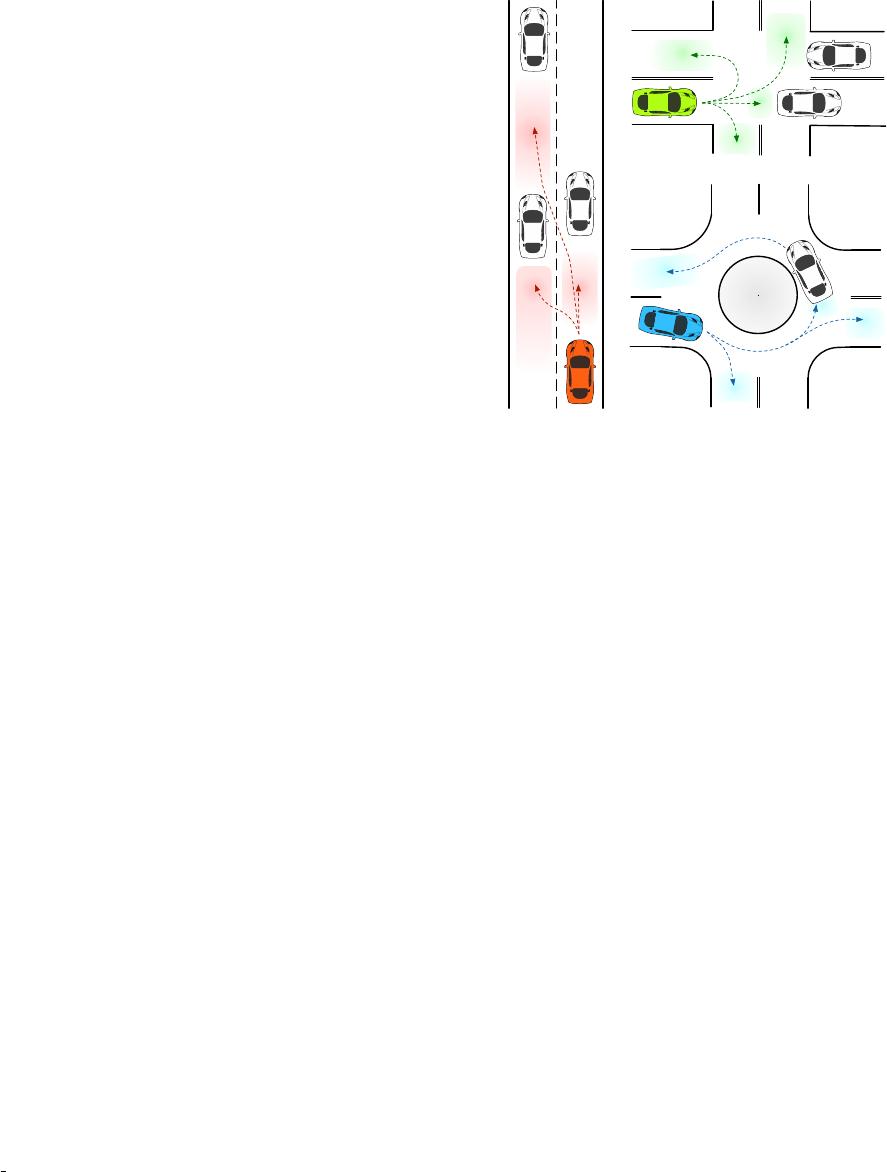
Fig. 1. Insertion areas (colored regions) under different driving scenarios
for the predicted vehicle.
which involves lane keeping (LK), lane change left (LCL)
and lane change right (LCR) maneuvers. Whereas [4]-[6]
concentrated on junction segment such as intersection, which
includes left turn, right turn, and go straight maneuvers.
However, in order for autonomous vehicles to drive through
dynamically changing traffic scenes in real life, an intention
prediction module that can adapt to different scenarios with
various possible driving maneuvers is necessary. [7] proposed
a maneuver estimation approach for generic traffic scenarios,
but the classified driving maneuvers are too specific, which
will not only require multiple manually-selected classifica-
tion thresholds, but also raise problems when unclassified
maneuvers occur.
As a result, we proposed to use semantics to represent
the driver intention, which is defined as the intent to enter
each insertion area. These areas can be the available gaps
between any two vehicles on the road or can be the lane
entrances/exits. Fig. 1 visualizes the insertion areas under
distinct environments. An advantage of using semantic ap-
proach is that situations can be modeled in a unified way
[8] such that varying driving scenarios will have no effect
on our semantics defined problem. Even for a scenario that
has a combination of all the road structures in Fig. 1, the
proposed semantic definition still holds.
Motion prediction is mostly treated as a regression prob-
lem, where it tries to forecast the short-term movements and
long-term trajectories of vehicles. By incorporating motion
2018 IEEE Intelligent Vehicles Symposium (IV)
Changshu, Suzhou, China, June 26-30, 2018
978-1-5386-4451-5/18/$31.00 ©2018 IEEE 307

prediction with intention estimation, not only the high-
level behavioral information, but also the future state of the
predicted vehicle can be obtained. For short-term motion
prediction, various approaches such as constant acceleration
(CA), Intelligent Driver Model (IDM) [6], and Particle Filter
(PF) [9] have been suggested. The main limitation of these
works, however, is that they either considered simple cases
such as car following or did not take environment informa-
tion into account.
For future trajectory estimation, Dynamic Bayesian Net-
works (DBN) [10] and other regression models [11] have
been used in several studies. Methods based on artificial
neural network (ANN) are also widely applied. In [12],
the authors used the LSTM to predict the vehicle trajec-
tory in highway situation. [13] brought forward a Deep
Neural Networks (DNN) to obtain the lateral acceleration
and longitudinal velocity. However, these approaches only
predicted the most likely trajectory for the vehicle without
considering uncertainties in the environment. To counter this
issue, a Variational Gaussian Mixture Model (VGMM) was
proposed for probabilistic long-term motion prediction [14].
Nevertheless, the method was only tested in a simulation
environment and the input contains history information over
a long period of time, which is usually unaccessible in
reality. There are also researches that project the prediction
step of a tracking filter forward over time, but the growing
uncertainties often cause future positions to end up at some
physically impossible locations.
In contrast, works such as [15] and [16] highlighted
that by predicting goal locations and assuming that agents
navigate toward those locations by following some optimal
paths, the accuracy of long-term prediction can be improved.
The main advantage of postulating destinations instead of
trajectories is that it allows one to represent various dynamics
and to automatically incorporate environment constraints for
unreachable regions.
Apart from obtaining the possible goals of predicted
vehicles, the required time to reach those locations is also an
essential information especially for the subsequent trajectory
planning of the ego vehicle. Therefore, many attempts have
been made in order to directly predict temporal information.
[17] used LSTM to forecase time-to-lane-change (TTLC)
of vehicles under highway scenarios. A recent work [18]
utilized the Linear Quantile Regression (LQR) and Quantile
Regression Forests (QRF) methods for the probabilistic re-
gression task of TTLC. The authors also concluded that QRF
has better performance than LQR.
In this paper, Semantic-based Intention and Motion Pre-
diction (SIMP) method is proposed. It utilizes deep neural
network to formulate a probabilistic framework which can
predict the possible semantic intention and motion of the
selected vehicle under various driving scenarios. The intro-
duced semantics for this prediction problem is defined as
answering the question of ”Which area will the predicted
vehicle most likely insert into? Where and when?”, which
incorporates both the goal position and the time information
into each insertion area. Moreover, the adoption of probabil-
ity can take into account the uncertainty of drivers as well
as the evolution of the traffic situations.
The remainder of the paper is organized as follows: Sec-
tion II provides the concept of the proposed SIMP method;
Section III discusses an exemplar scenario to apply SIMP;
evaluations and results are provided in Section IV; and
Section V concludes the paper.
II. CONCEPT OF SEMANTIC-BASED INTENTION AND
MOTION PREDICTION (SIMP)
In this section, we first provide a brief overview of Mixture
Density Network (MDN), which is an idea we utilize for
our proposed method. Then, the detailed formulation and
structure of the SIMP method are illustrated.
A. Mixture Density Network (MDN)
Mixture Density Network is a combination of ANN and
mixture density model, which was first introduced by Bishop
[19]. The mixture density model can be used to estimate the
underlying distribution of data, typically by assuming that
each data point has some probability under a certain type of
distribution. By using a mixture model, more flexibility can
be given to completely model the general conditional density
function p(y|x), where x is a set of input features and y is
a set of output. The probability density of the target data is
then represented as a linear combination of kernel functions
in the form
p(y|x) =
M
X
m=1
α
m
(x)φ
m
(y|x), (1)
where M denotes the total number of mixture components
and the parameter α
m
(x) denotes the m-th mixing coef-
ficient of the corresponding kernel function φ
m
(y|x). Al-
though various choices for the kernel function was possible,
for this paper, we utilize the Gaussian kernel of the form
φ
m
(y|x) = N(y|µ
m
(x), σ
2
m
(x)). (2)
Such formulation is called the Gaussian Mixture Model
(GMM)-based MDN, where a MDN maps input x to the
parameters of the GMM (mixing coefficient α
m
, mean µ
m
,
and variance σ
2
m
), which in turn gives a full probability
density function of the output y. It is important to note
that the parameters of the GMM need to satisfy specific
conditions in order to be valid: the mixing coefficients α
m
should be positive and sum to 1; the standard deviation σ
m
should be positive. The use of softmax function and expo-
nential operator in (3) fulfills the aforementioned constraints.
In addition, no extra condition is needed for the mean µ
m
.
α
m
=
exp(z
α
m
)
P
M
i=1
exp(z
α
i
)
, σ
m
= exp(z
σ
m
), µ
m
= z
µ
m
(3)
The parameters z
α
m
, z
σ
m
, z
µ
m
are the direct outputs of the
MDN corresponding to the mixture weight, variance and
mean for the m-th Gaussian component in the GMM.
308
of 7
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论