




13.Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition.pdf
50墨值下载
1
Spatial Pyramid Pooling in Deep Convolutional
Networks for Visual Recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun
Abstract—Existing deep convolutional neural networks (CNNs) require a fixed-size (e.g., 224×224) input image. This require-
ment is “artificial” and may reduce the recognition accuracy for the images or sub-images of an arbitrary size/scale. In this work,
we equip the networks with a more principled pooling strategy, “spatial pyramid pooling”, to eliminate the above requirement. The
new network structure, called SPP-net, can generate a fixed-length representation regardless of image size/scale. Pyramid
pooling is also robust to object deformations. With these advantages, SPP-net should in general improve all CNN-based
image classification methods. On the ImageNet 2012 dataset, we demonstrate that SPP-net boosts the accuracy of a variety
of published CNN architectures despite their different designs. On the Pascal VOC 2007 and Caltech101 datasets, SPP-net
achieves state-of-the-art classification results using a single full-image representation and no fine-tuning.
The power of SPP-net is also significant in object detection. Using SPP-net, we compute the feature maps from the entire
image only once, and then pool features in arbitrary regions (sub-images) to generate fixed-length representations for training
the detectors. This method avoids repeatedly computing the convolutional features. In processing test images, our method
computes convolutional features 30-170× faster than the recent and most accurate method R-CNN (and 24-64× faster overall),
while achieving better or comparable accuracy on Pascal VOC 2007.
In ImageNet Large Scale Visual Recognition Challenge (ILSVRC) 2014, our methods rank #2 in object detection and #3 in
image classification among all 38 teams. This manuscript also introduces the improvement made for this competition.
Index Terms—Convolutional Neural Networks, Spatial Pyramid Pooling, Image Classification, Object Detection
F
1 INTRODUCTION
We are witnessing a rapid, revolutionary change in
our vision community, mainly caused by deep con-
volutional neural networks (CNNs) [1] and the avail-
ability of large scale training data [2]. Deep-networks-
based approaches have recently been substantially
improving upon the state of the art in image clas-
sification [3], [4], [5], [6], object detection [7], [8], [5],
many other recognition tasks [9], [10], [11], [12], and
even non-recognition tasks.
However, there is a technical issue in the training
and testing of the CNNs: the prevalent CNNs require
a fixed input image size (e.g., 224×224), which limits
both the aspect ratio and the scale of the input image.
When applied to images of arbitrary sizes, current
methods mostly fit the input image to the fixed size,
either via cropping [3], [4] or via warping [13], [7],
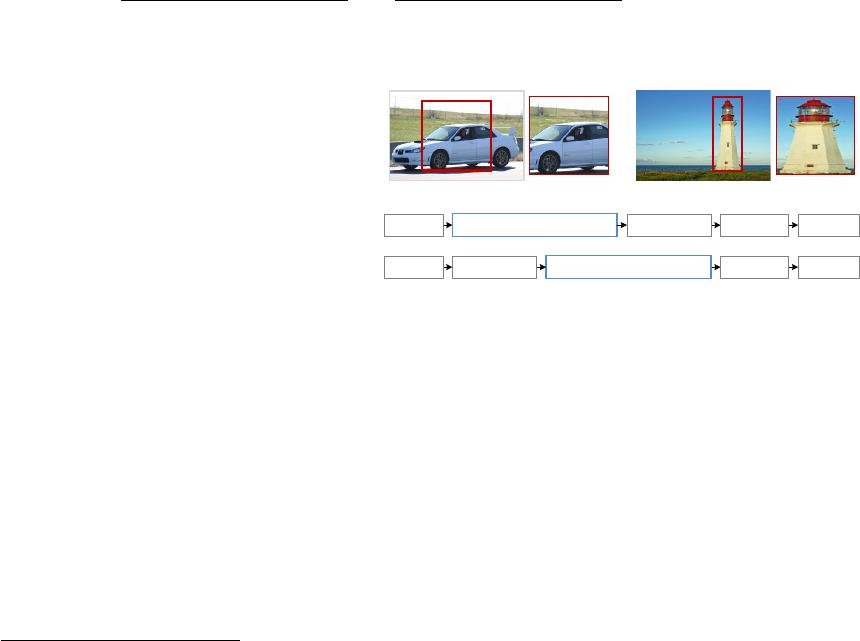
as shown in Figure 1 (top). But the cropped region
may not contain the entire object, while the warped
content may result in unwanted geometric distortion.
Recognition accuracy can be compromised due to the
content loss or distortion. Besides, a pre-defined scale
• K. He and J. Sun are with Microsoft Research, Beijing, China. E-mail:
{kahe,jiansun}@microsoft.com
• X. Zhang is with Xi’an Jiaotong University, Xi’an, China. Email:
xyz.clx@stu.xjtu.edu.cn
• S. Ren is with University of Science and Technology of China, Hefei,
China. Email: sqren@mail.ustc.edu.cn
This work was done when X. Zhang and S. Ren were interns at Microsoft
Research.
crop warp
spatial pyramid pooling
crop / warp
conv layersimage fc layers output
image conv layers fc layers output
Figure 1: Top: cropping or warping to fit a fixed size.
Middle: a conventional deep convolutional network
structure. Bottom: our spatial pyramid pooling net-
work structure.
(e.g., 224) may not be suitable when object scales vary.
Fixing the input size overlooks the issues involving
scales.
So why do CNNs require a fixed input size? A CNN
mainly consists of two parts: convolutional layers,
and fully-connected layers that follow. The convo-
lutional layers operate in a sliding-window manner
and output feature maps which represent the spatial
arrangement of the activations (Figure 2). In fact, con-
volutional layers do not require a fixed image size and
can generate feature maps of any sizes. On the other
hand, the fully-connected layers need to have fixed-
size/length input by their definition. Hence, the fixed-
size constraint comes only from the fully-connected
layers, which exist at a deeper stage of the network.
arXiv:1406.4729v2 [cs.CV] 29 Aug 2014

2
filter #175
filter #55
(a) image (b) feature maps (c) strongest activations
filter #66
filter #118
(a) image (b) feature maps (c) strongest activations
Figure 2: Visualization of the feature maps. (a) Two images in Pascal VOC 2007. (b) The feature maps of some
conv
5
filters. The arrows indicate the strongest responses and their corresponding positions in the images.
(c) The ImageNet images that have the strongest responses of the corresponding filters. The green rectangles
mark the receptive fields of the strongest responses.
In this paper, we introduce a spatial pyramid pool-
ing (SPP) [14], [15] layer to remove the fixed-size
constraint of the network. Specifically, we add an
SPP layer on top of the last convolutional layer. The
SPP layer pools the features and generates fixed-
length outputs, which are then fed into the fully-
connected layers (or other classifiers). In other words,
we perform some information “aggregation” at a
deeper stage of the network hierarchy (between con-
volutional layers and fully-connected layers) to avoid
the need for cropping or warping at the beginning.
Figure 1 (bottom) shows the change of the network
architecture by introducing the SPP layer. We call the
new network structure SPP-net.
We believe that aggregation at a deeper stage is
more physiologically sound and more compatible
with the hierarchical information processing in our
brains. When an object comes into our field of view,
it is more reasonable that our brains consider it as
a whole instead of cropping it into several “views”
at the beginning. Similarly, it is unlikely that our
brains distort all object candidates into fixed-size re-
gions for detecting/locating them. It is more likely
that our brains handle arbitrarily-shaped objects at
some deeper layers, by aggregating the already deeply
processed information from the previous layers.
Spatial pyramid pooling [14], [15] (popularly
known as spatial pyramid matching or SPM [15]), as
an extension of the Bag-of-Words (BoW) model [16],
is one of the most successful methods in computer
vision. It partitions the image into divisions from
finer to coarser levels, and aggregates local features
in them. SPP has long been a key component in the
leading and competition-winning systems for classi-
fication (e.g., [17], [18], [19]) and detection (e.g., [20])
before the recent prevalence of CNNs. Nevertheless,
SPP has not been considered in the context of CNNs.
We note that SPP has several remarkable properties
for deep CNNs: 1) SPP is able to generate a fixed-
length output regardless of the input size, while the
sliding window pooling used in the previous deep
networks [3] cannot; 2) SPP uses multi-level spatial
bins, while the sliding window pooling uses only
a single window size. Multi-level pooling has been
shown to be robust to object deformations [15]; 3) SPP
can pool features extracted at variable scales thanks
to the flexibility of input scales. Through experiments
we show that all these factors elevate the recognition
accuracy of deep networks.
SPP-net not only makes it possible to generate rep-
resentations from arbitrarily sized images/windows
for testing, but also allows us to feed images with
varying sizes or scales during training. Training with
variable-size images increases scale-invariance and
reduces over-fitting. We develop a simple multi-size
training method. For a single network to accept
variable input sizes, we approximate it by multiple
networks that share all parameters, while each of
these networks is trained using a fixed input size. In
each epoch we train the network with a given input
size, and switch to another input size for the next
epoch. Experiments show that this multi-size training
converges just as the traditional single-size training,
and leads to better testing accuracy.
The advantages of SPP are orthogonal to the specific
CNN designs. In a series of controlled experiments on
the ImageNet 2012 dataset, we demonstrate that SPP
improves four different CNN architectures in existing
publications [3], [4], [5] (or their modifications), over
the no-SPP counterparts. These architectures have
various filter numbers/sizes, strides, depths, or other
designs. It is thus reasonable for us to conjecture
that SPP should improve more sophisticated (deeper
and larger) convolutional architectures. SPP-net also
shows state-of-the-art classification results on Cal-
tech101 [21] and Pascal VOC 2007 [22] using only a
single full-image representation and no fine-tuning.
SPP-net also shows great strength in object detec-
tion. In the leading object detection method R-CNN
[7], the features from candidate windows are extracted
via deep convolutional networks. This method shows
remarkable detection accuracy on both the VOC and
of 14
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论