




Synthetically Trained Neural Networks for Learning Human-Readable Plans from Real-World Demonstrations.pdf
50墨值下载
Synthetically Trained Neural Networks for Learning
Human-Readable Plans from Real-World Demonstrations
Jonathan Tremblay Thang To Artem Molchanov
†
Stephen Tyree Jan Kautz Stan Birchfield
Abstract— We present a system to infer and execute a human-
readable program from a real-world demonstration. The system
consists of a series of neural networks to perform percep-
tion, program generation, and program execution. Leveraging
convolutional pose machines, the perception network reliably
detects the bounding cuboids of objects in real images even
when severely occluded, after training only on synthetic images
using domain randomization. To increase the applicability of the
perception network to new scenarios, the network is formulated
to predict in image space rather than in world space. Additional
networks detect relationships between objects, generate plans,
and determine actions to reproduce a real-world demonstration.
The networks are trained entirely in simulation, and the system
is tested in the real world on the pick-and-place problem of
stacking colored cubes using a Baxter robot.
I. INTRODUCTION
In order for robots to perform useful tasks in real-world
settings, it must be easy to communicate the task to the robot;
this includes both the desired end result and any hints as to
the best means to achieve that result. In addition, the robot
must be able to perform the task robustly with respect to
changes in the state of the world, uncertainty in sensory
input, and imprecision in control output.
Teaching a robot by demonstration is a powerful approach
to solve these problems. With demonstrations, a user can
communicate a task to the robot and provide clues as to how
to best perform the task. Ideally, only a single demonstration
should be needed to show the robot how to do a new task.
Unfortunately, a fundamental limitation of demonstrations
is that they are concrete. If someone pours water into a glass,
the intent of the demonstration remains ambiguous. Should
the robot also pour water? If so, then into which glass?
Should it also pour water into an adjacent mug? When should
it do so? How much water should it pour? What should
it do if there is no water? And so forth. Concrete actions
themselves are insufficient to answer such questions. Rather,
abstract concepts must be inferred from the actions.
We believe that language, with its ability to capture ab-
stract universal concepts, is a natural solution to this problem
of ambiguity. By inferring a human-readable description of
the task from the demonstration, such a system allows the
user to debug the output and verify whether the demon-
stration was interpreted correctly by the system. A human-
readable description of the task can then be edited by the user
to fix any errors in the interpretation. Such a description also
The authors are affiliated with NVIDIA. Email: {jtremblay,
thangt, styree, jkautz, sbirchfield}@nvidia.com
†
Work was performed as an intern with NVIDIA. Also affiliated with the
University of Southern California. Email: molchano@usc.edu
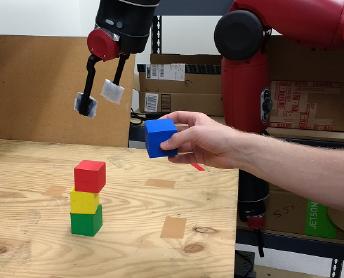
Fig. 1. In this work, a human stacks colored cubes either vertically or in a
pyramid. A sequence of neural networks learns a human-readable program
to be executed by a robot to recreate the demonstration.
provides qualitative insight into the expected ability of the
system to leverage previous experience on novel tasks and
scenarios.
In this paper we take a step in this direction by proposing a
system that learns a human-readable program from a single
demonstration in the real world. The learned program can
then be executed in the environment with different initial
conditions. The program is learned by a series of neural
networks that are trained entirely in simulation, thus yielding
inexpensive training data. To make the problem tractable, we
focus in this work on stacking colored cubes either vertically
or in pyramids, as illustrated in Fig. 1. Our system contains
the following contributions:
• The system learns from a single demonstration in the
real world. We believe that real-world demonstrations
are more natural, being applicable to a wider set of sce-
narios due to the reduced system complexity required,
as compared to AR/VR systems (e.g., [7]).
• The system generates human-readable plans. As demon-
strated in [8], this enables the resulting plan to be
verified by a human user before execution.
• The paper introduces image-centric domain randomiza-
tion for training the perception network. In contrast with
a world-centric approach (e.g., [27]), an image-centric
network makes fewer assumptions about the camera’s
position within the environment or the presence and
visibility of fixed objects (such as a table), and is
therefore portable to new situations without retraining.
1
1
Recalibrating to determine a camera’s exterior orientation is arguably
easier than creating a virtual environment to match a new actual environ-
ment, generating new training images, and retraining a network.
II. PREVIOUS WORK
Our work draws inspiration from recent work on one-
shot imitation learning. Duan et al. [7], for example, use
simulation to train a network by watching a user demonstra-
tion and replicating it with a robot. The method leverages a
special neural network architecture that extensively uses soft-
attention in combination with memory. During an extensive
training phase in a simulated environment, the network learns
to correctly repeat a demonstrated block stacking task. The
complexity of the architecture, in particular the attention and
memory mechanisms, support robustness when repeating the
demonstration, e.g., allowing the robot to repeat a failed step.
However, the intermediate representations are not designed
for interpretability. As argued in [11], the ability to generate
human interpretable representations is crucial for modularity
and stronger generalization, and thus it is a main focus of
our work.
Another closely related work by Denil et al. [5] learns
programmable agents capable of executing readable pro-
grams. They consider reinforcement learning in the context
of a simulated manipulator reaching task. This work draws
parallels to the third component of our architecture (the
execution network), which translates a human-readable plan
into a closed-loop sequence of robotic actions. Further, our
approach of decomposing the system is similar in spirit to
the modular networks of [6].
These prior approaches operate on a low-dimensional
representation of the objects in the environment and train
in simulation. Like Duan et al. [7], we acquire a label-free
low-dimensional representation of the world by leveraging
simulation-to-reality transfer. We use the simple but effective
principle of domain randomization [27] for transferring a
representation learned entirely in simulation. This approach
has been successfully applied in several robotic learning
applications, including the aforementioned work in demon-
stration learning [7], as well as grasp prediction [27] and
visuomotor control [16]. Building on prior work, we acquire
a more detailed description of the objects in a scene using
object part inference inspired by Cao et al. [3], allowing the
extraction of interpretable intermediate representations and
inference of additional object parameters, such as orientation.
Further, we make predictions in image space, so that robust
transfer to the real world requires only determining the
camera’s extrinsic parameters, rather than needing to develop
a simulated world to match the real environment for training.
Related work in imitation learning trains agents via
demonstrations. These methods typically focus on learning a
single complex task, e.g., steering a car based on human
demonstrations, instead of learning how to perform one-
shot replication in a multi-task scenario, e.g., repeating a
specific demonstrated block stacking sequence. Behavior
cloning [22], [23], [24] treats learning from demonstration as
a supervised learning problem, teaching an agent to exactly
replicate the behavior of an expert by learning a function
from the observed state to the next expert action. This ap-
proach may suffer as errors accumulate in the agent’s actions
leading eventually to states not encountered by the expert.
Inverse reinforcement learning [15], [19], [1] mitigates this
problem by estimating a reward function to explain the
behavior of the expert and training a policy with the learned
reward mapping. It typically requires running an expensive
reinforcement learning training step in the inner loop of
optimization or, alternatively, applying generative adversarial
networks [14], [13] or guided cost learning [10].
The conjunction of language and vision for environment
understanding has a long history. Early work by Wino-
grad [30] explored the use of language for a human to guide
and interpret interactions between a computerized agent and
a simulated 3D environment. Models can be learned to per-
form automatic image captioning [28], video captioning [25],
visual question answering [12], and understanding of and
reasoning about visual relationships [18], [21], [17]—all
interacting with a visual scene in natural language.
Recent work has studied the grounding of natural language
instructions in the context of robotics [20]. Natural language
utterances and the robot’s visual observations are grounded
in a symbolic space and the associated grounding graph,
allowing the robot to infer the specific actions required to
follow a subsequent verbal command.
Neural task programming (NTP) [31], a concurrent work
to ours, achieves one-shot imitation learning with an on-
line hierarchical task decomposition. An RNN-based NTP
model processes a demonstration to predict the next sub-
task (e.g., “pick-and-place”) and a relevant sub-sequence of
the demonstration, which are recursively input to the NTP
model. The base of the hierarchy is made up of primitive
sub-tasks (e.g., “grip”, “move”, or “release”), and recursive
sub-task prediction is made with the current observed state as
input, allowing closed loop control. Like our work, the NTP
model provides a human-readable program, but unlike our
approach the NTP program is produced during execution,
not before.
III. METHOD
An overview of our system is shown in Fig. 2. A camera
acquires a live video feed of a scene, and the positions and
relationships of objects in the scene are inferred in real time
by a pair of neural networks. The resulting percepts are fed
to another network that generates a plan to explain how to
recreate those percepts. Finally, an execution network reads
the plan and generates actions for the robot, taking into
account the current state of the world in order to ensure
robustness to external disturbances.
A. Perception networks
Given a single image, our perception networks infer the lo-
cations of objects in the scene and their relationships. These
networks perform object detection with pose estimation, as
well as relationship inference.
1) Image-centric domain randomization: Each object of
interest in this work is modeled by its bounding cuboid
consisting of up to seven visible vertices and one hidden
vertex. Rather than directly mapping from images to object
of 9
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论