




AutonoVi-Sim:具有天气,传感和交通控制的自主车辆仿真平台.pdf
50墨值下载
AutonoVi-Sim: Autonomous Vehicle Simulation
Platform with Weather, Sensing, and Traffic control
Anonymous Author(s)
Affiliation
Address
email
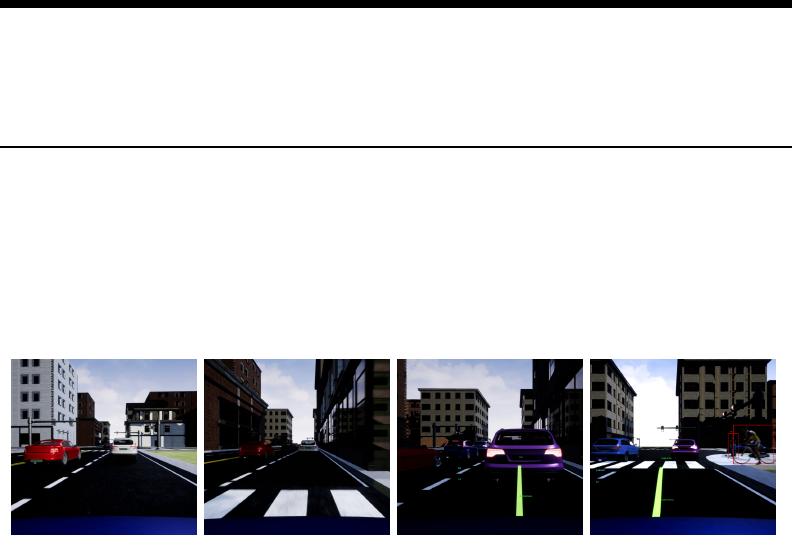
(A) (B) (C) (D)
Figure 1:
Training Data Sequence from a Simulated Vehicle
: Data gathered from a vehicle
navigating in traffic among other vehicles, cyclists and pedestrians.
(B)
: The visual profile changes as
the vehicle enters the building’s shadow.
(C)
Image annotated with the vehicle’s steering decision in
traffic. (D): The vehicle passes a pedestrian and cyclist (highlighted in red) at an intersection.
Abstract
We present AutonoVi-Sim, a novel high-fidelity simulation platform for au-
1
tonomous driving data generation and driving strategy testing. AutonoVi-Sim
2
is a collection of high-level extensible modules which allows the rapid develop-
3
ment and testing of vehicle configurations and facilitates construction of complex4
traffic scenarios. Autonovi-Sim supports multiple vehicles with unique steering
5
or acceleration limits, as well as unique tire parameters and dynamics profiles.
6
Engineers can specify the specific vehicle sensor systems and vary time of day and
7
weather conditions to generate robust data and gain insight into how conditions
8
affect the performance of a particular algorithm. In addition, AutonoVi-Sim sup-
9
ports navigation for non-vehicle traffic participants such as cyclists and pedestrians,
10
allowing engineers to specify routes for these actors, or to create scripted scenarios
11
which place the vehicle in dangerous reactive situations. Autonovi-Sim facilitates
12
training of deep-learning algorithms by enabling data export from the vehicle’s
13
sensors, including camera data, LIDAR, relative positions of traffic participants,
14
and detection and classification results. Thus, AutonoVi-Sim allows for the rapid
15
prototyping, development and testing of autonomous driving algorithms under
16
varying vehicle, road, traffic, and weather conditions.17
1 Introduction18
Autonomous driving represents an imminent challenge encompassing a number of domains including
19
robotics, computer vision, motion planning, civil engineering, and simulation. Central to this
20
challenge are the safety considerations of autonomous vehicles navigating the roads surrounded by
21
unpredictable actors. Humans, whether drivers, pedestrians, or cyclists, often behave erratically,
22
Submitted to 31st Conference on Neural Information Processing Systems (NIPS 2017). Do not distribute.
inconsistently, or dangerously, forcing other vehicles (including autonomous vehicles) to react quickly
23
to avoid hazards. In order to facilitate acceptance and guarantee safety, vehicles must be tested not
24
only in typical, relatively safe scenarios, but also in dangerous, less frequent scenarios.25
Aside from safety concerns, costs pose an additional challenge to the testing of autonomous driving
26
algorithms. Each new configuration of a vehicle or new sensor requires re-calibration of a physical
27
vehicle, which is labor intensive. Furthermore, the vehicle can only be tested under conditions limited
28
either by a testing track, or the current traffic conditions if a road test is being performed. This means
29
the vehicle can be tested no faster than real-time and without any speedups or parallel testing.30
Many recent approaches to autonomous driving rely on machine-learning via Bayesian networks
31
or deep-learning to provide entity detection [
1
], entity prediction [
2
], and end-to-end control [
3
].
32
However, such approaches rely on substantial amounts of annotated data in safe, as well as dangerous
33
scenarios. The dataset must also encompass varied weather and lighting conditions. In addition, not
34
all autonomous vehicles are equipped with identical or equivalent sensing capability; training data
35
must be available for the specific configuration or sensors of the vehicle being tested. Gathering such
36
data by physical tests can be expensive, difficult and even dangerous. In contrast, a high-fidelity
37
simulator can augment and improve training of algorithms, and allow for testing safely and efficiently.
38
Insights gained from simulation could provide critical training data and information on algorithmic
39
inefficiencies before actual vehicle testing. In an effort to facilitate progress in these areas, we present
40
AutonoVi-Sim, a simulation framework for training and testing autonomous driving algorithms and41
sensors. AutonoVi-Sim is a collection of high-level, extensible modules designed to allow researchers
42
and engineers to rapidly configure novel road networks, driving scenarios, and vehicle configurations,
43
and to test these in a variety of weather and lighting conditions. AutonoVi-Sim captures a variety of
44
autonomous driving phenomena and testing requirements including:45
• Data Generation
: Autonovi-Sim facilitates data analysis by allowing exports of relevant
46
data for traffic proximate to the autonomous vehicle as well as data from each virtual sensor
47
on the vehicle. Sensor and local traffic data can be used in training deep-learning approaches
48
by generating automatically labelled classification and decision data efficiently.49
• Varying vehicle, cyclist, pedestrian, and traffic conditions
: AutonoVi-Sim includes vari-
50
ous vehicle and sensor models, pedestrians, and cyclists. Diversity of these traffic entities
51
allows for training classification on differing shapes, sizes, colors, and behaviors of cyclists,
52
pedestrians, and other drivers.53
• Dynamic Traffic, Weather and Lighting Conditions
: AutonoVi-Sim provides high fi-
54
delity traffic simulation, supporting dynamic changes in traffic density, time of day, lighting,
55
and weather including rain and fog.56
• Rapid Scenario Construction
: Typical road networks can be easily laid out using spline
57
painting and are automatically connected for routing and navigation purposes. AutonoVi-
58
Sim supports many lane configurations and atypical road geometry such as cloverleaf
59
overpasses. In addition, other vehicles and entities can be scripted to generate repeatable
60
erratic behavior, e.g. cutting in front of the ego-vehicle, walking into the road.61
The rest of the paper is organized as follows. In section 2, we motivate simulation as a tool for
62
advancing autonomous driving and detail related work in the field. In section 3, we detail the core
63
modules provided by AutonoVi-Sim. We reserve discussion of the Drivers and Vehicles modules for
64
section 4 and offer demonstrations of the simulator.65
2 RELATED WORK66
Simulation has been an integral tool in the development of controllers for autonomous vehicles. [
4
],
67
[
5
], and [
6
] offer in-depth surveys of the current state of the art and the role simulation has played.
68
Many successful vehicle demonstrations of autonomy were first tested in simulation [
7
,
8
,
9
]. Recent
69
work in traffic modelling has sought to increase the fidelity of the modelled drivers and vehicles; a
70
survey is provided in [10].71
Recent studies support the use of high-fidelity microscopic simulation for data-gathering and training
72
of vision systems. [
11
] and [
12
] and leveraged Grand Theft Auto 5 to train a deep-learning classifier
73
at comparable performance to manually annotated real-world images. Several recent projects seek
74
of 8
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论