




社会意识自主车辆导航的群体情绪分类.pdf
50墨值下载
The Socially Invisible Robot
Navigation in the Social World using Robot Entitativity
Aniket Bera
1
, Tanmay Randhavane
1
, Emily Kubin
2
, Austin Wang
1
, Kurt Gray
2
, and Dinesh Manocha
1
Abstract— We present a real-time, data-driven algorithm to
enhance the social-invisibility of robots within crowds. Our
approach is based on prior psychological research, which
reveals that people notice and–importantly–react negatively to
groups of social actors when they have high entitativity, moving
in a tight group with similar appearances and trajectories. In
order to evaluate that behavior, we performed a user study
to develop navigational algorithms that minimize entitativity.
This study establishes mapping between emotional reactions
and multi-robot trajectories and appearances, and further
generalizes the finding across various environmental conditions.
We demonstrate the applicability of our entitativity modeling
for trajectory computation for active surveillance and dynamic
intervention in simulated robot-human interaction scenarios.
Our approach empirically shows that various levels of entitative
robots can be used to both avoid and influence pedestrians
while not eliciting strong emotional reactions, giving multi-robot
systems socially-invisibility.
I. INTRODUCTION
As robots have become more common in social environ-
ments, people’s expectations of their social skills have
increased. People often want robots to be more socially
visible–more salient social agents within group contexts [17].
This social visibility includes being more capable of drawing
the attention of humans and evoking powerful emotions [22].
Cases of social visibility include tasks in which robots must
work collaboratively with humans. However, not all contexts
require socially visible robots. There are situations in which
robots are not used to collaborate with people but instead
used to monitor them. In these cases, it may be better for
robots to be socially invisible.
Social invisibility refers to the ability of agents to escape
the attention of other people. For example, psychological
research reveals that African Americans often go unnoticed
in social environments[11], especially reactions related to
threat. Evolution has attuned the human brain to respond
rapidly to threatening stimuli, thus the less a person–or
a robot–induces negative emotion, the less likely it is to
be noticed within a social milieu. The social invisibility
conferred by not inducing emotion is especially important in
surveillance contexts in which robots are expected to move
seamlessly among people without being noticed. Noticing
surveillance robots not only makes people hide their behav-
ior, but the negative emotions that prompt detection may
also induce reactance [9], which may lead to people to lash
out and harm the robots or even other people [12] Research
reveals a number of ways of decreasing negative emotional
1
Authors from the Department of Computer Science, University of North
Carolina at Chapel Hill, USA
2
Authors from the Department of Psychology and Neuroscience, Univer-
sity of North Carolina at Chapel Hill, USA
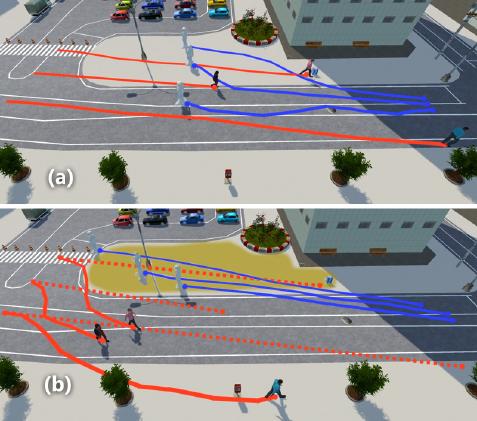
Fig. 1: Multi-robot systems (robots marked by blue trajec-
tories) are used among crowds for surveillance and mon-
itoring. Our novel navigation algorithm takes into account
various levels of physical and social constraints and use them
for: (a) Active surveillance including monitoring crowds (red
trajectories) while moving through them with no collisions;
(b) Dynamic intervention where the robots try to influence
the crowd behavior and movements and make the pedestrians
avoid the area marked by a yellow overlay. The dashed
red line indicates the predicted pedestrian trajectories if the
robots did not attempt to dynamically intervene.
reactions towards social agents [10], but one element may
be especially important for multi-robot systems: entitativity
[13], “groupiness”) is tied to three main elements, uniformity
of appearance, common movement, and proximity to one
another. The more agents look and move the same, and the
closer agents are to each other, the more entitative a group
seems, which is why a marching military platoon seems more
grouplike than people milling around a shopping mall.
The threatening nature of groups means that the more entita-
tive (or grouplike) a collection of agents seem, the greater the
emotional reaction they induce and the greater their social
visibility. As maximizing the social invisibility of collections
of agents requires minimizing perceptions of threat, it is im-
portant for multi-robot systems to minimize their entitativity.
In other words, if multi-robots systems are to move through
groups without eliciting negative reactions [16], they must
seem more like individuals and less like a cohesive and
coordinated group.
arXiv:1805.05543v2 [cs.RO] 18 Jul 2018

Fig. 2: Our method takes a live or streaming crowd video as an input. We extract the initial set of pedestrian trajectories
using an online pedestrian tracker. Based on the level of social invisibility we want to achieve, we compute motion model
parameters of the robot group using a data-driven entitativity mapping (which we compute based on a user-study(Section
IV)).
Main Results: We present a novel, real-time planning
algorithm that seeks to optimize entitativity within pedestrian
environments in order to increase socially-invisible navi-
gation (by minimizing negative emotional reactions). First,
we conduct a user study to empirically tie trajectories of
multi-robot systems to emotional reactions, revealing that–as
predicted–more entitative robots are seen as more unnerving.
Second, we generalize these results across a number of
different environmental conditions (like lighting). Third, we
extract the trajectory of each pedestrian from the video and
use Bayesian learning algorithms to compute their motion
model. Using entitativity features of groups of robots and
the pedestrians, we perform long-term path prediction for
the pedestrians. To determine these entitativity features we
establish a data-driven entitativity mapping (EDM) between
the group robot motion and entitativity measure from an
elaborate web-based perception user study that compares the
participants’ emotional reactions towards simulated videos
of multiple robots. Specifically, highly entitative collections
of robots are reported as unnerving and uncomfortable. The
results of our mapping are well supported by psychology
literature on entitativity [34].
We highlight the benefits of our data-driven metric for use
of multiple robots for crowd surveillance and active interfer-
ence. We attempt to provide maximally efficient navigation
and result in maximum social invisibility. In order to pursue
different sets of scenarios and applications, we highlight the
performance of our work in multiple surveillance scenarios
based on the level of increasing social interaction between
the robots and the humans.
Our approach has the following benefits:
1. Entitativity Computation: Our algorithm accurately pre-
dicts emotional reactions (entitativity) of pedestrians towards
robots in groups.
2. Robust computation: Our algorithm is robust and can
account for noise in pedestrian trajectories, extracted from
videos.
3. Fast and Accurate: Our algorithm involves no pre-
computation and evaluates the entitativity behaviors at in-
teractive rates.
The rest of the paper is organized as follows. In Section 2,
we review the related work in the field of psychology and
behavior modeling. In Section 3, we give a background on
quantifying entitativity and introduce our notation. In Section
4, we present our interactive algorithm, which computes
the perceived group entitativity from trajectories extracted
from video. In Section 5, we describe our user study on the
perception of multiple simulated robots with varying degrees
of entitativity.
II. RELATED WORK
Human beings are inherently social creatures, making inter-
acting with and perceiving others an important part of the
human experience. Complex interactions within brain regions
work harmoniously to navigate the social landscape [36].
Interesting patterns emerge when attempting to understand
how humans view groups of people.
A. Psychological Perspectives on Group Dynamics
A long-standing tenet of social psychology is that people’s
behaviors hinge upon their group context. Importantly, the
impact of social dynamics is highly influenced by group
contexts [38]–often for the worse. Decades of psychological
research reveals that people interact more negatively with
groups than with individuals [34], expressing more hostility
towards and feeling more threatened by a group than an
individual [16]. Such reactions to groups have real world
implications, especially when onlookers have the ability to
act violently. At the heart of these anti-social actions are
negative emotional reactions, which can be directed at any
social agent, whether human or robot [19]. Most often, these
emotions are unease [8], threat [19], and fear [30].
B. Human-Aware Robot Navigation
Many approaches have been applied towards the navigation
of socially-aware robots [31], [7], [3], [15], [25], [29], [18],
of 9
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论