




Pix3D:单图像3D形状建模的数据集和方法.pdf
50墨值下载
Pix3D: Dataset and Methods for Single-Image 3D Shape Modeling
Xingyuan Sun
∗1,2
Jiajun Wu
∗1
Xiuming Zhang
1
Zhoutong Zhang
1
Chengkai Zhang
1
Tianfan Xue
3
Joshua B. Tenenbaum
1
William T. Freeman
1,3
1
Massachusetts Institute of Technology
2
Shanghai Jiao Tong University
3
Google Research
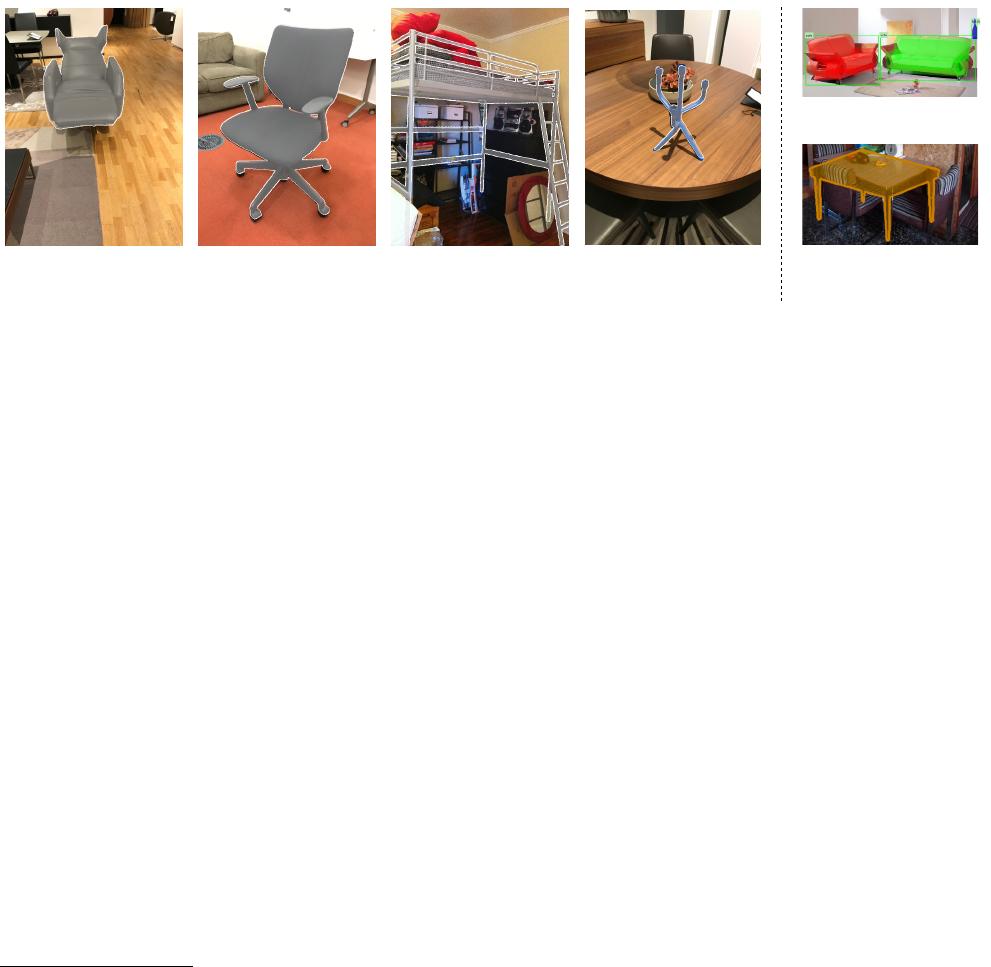
Mismatched 3D shapes
Imprecise pose annotationsWell-aligned images and shapes
Our Dataset: Pix3D Existing Datasets
Figure 1: We present Pix3D, a new large-scale dataset of diverse image-shape pairs. Each 3D shape in Pix3D is associated with a rich and
diverse set of images, each with an accurate 3D pose annotation to ensure precise 2D-3D alignment. In comparison, existing datasets have
limitations: 3D models may not match the objects in images; pose annotations may be imprecise; or the dataset may be relatively small.
Abstract
We study 3D shape modeling from a single image and make
contributions to it in three aspects. First, we present Pix3D,
a large-scale benchmark of diverse image-shape pairs with
pixel-level 2D-3D alignment. Pix3D has wide applications in
shape-related tasks including reconstruction, retrieval, view-
point estimation, etc. Building such a large-scale dataset,
however, is highly challenging; existing datasets either con-
tain only synthetic data, or lack precise alignment between
2D images and 3D shapes, or only have a small number of
images. Second, we calibrate the evaluation criteria for 3D
shape reconstruction through behavioral studies, and use
them to objectively and systematically benchmark cutting-
edge reconstruction algorithms on Pix3D. Third, we design
a novel model that simultaneously performs 3D reconstruc-
tion and pose estimation; our multi-task learning approach
achieves state-of-the-art performance on both tasks.
1. Introduction
The computer vision community has put major efforts in
building datasets. In 3D vision, there are rich 3D CAD model
∗ indicates equal contributions.
repositories like ShapeNet [
7
] and the Princeton Shape Bench-
mark [
50
], large-scale datasets associating images and shapes
like Pascal 3D+ [
65
] and ObjectNet3D [
64
], and benchmarks
with fine-grained pose annotations for shapes in images like
IKEA [39]. Why do we need one more?
Looking into Figure 1, we realize existing datasets have
limitations for the task of modeling a 3D object from a single
image. ShapeNet is a large dataset for 3D models, but does
not come with real images; Pascal 3D+ and ObjectNet3D have
real images, but the image-shape alignment is rough because
the 3D models do not match the objects in images; IKEA has
high-quality image-3D alignment, but it only contains 90 3D
models and 759 images.
We desire a dataset that has all three merits—a large-scale
dataset of real images and ground-truth shapes with precise
2D-3D alignment. Our dataset, named Pix3D, has 395 3D
shapes of nine object categories. Each shape associates with
a set of real images, capturing the exact object in diverse
environments. Further, the 10,069 image-shape pairs have
precise 3D annotations, giving pixel-level alignment between
shapes and their silhouettes in the images.
Building such a dataset, however, is highly challenging.
For each object, it is difficult to simultaneously collect its
high-quality geometry and in-the-wild images. We can crawl
arXiv:1804.04610v1 [cs.CV] 12 Apr 2018

many images of real-world objects, but we do not have access
to their shapes; 3D CAD repositories offer object geometry,
but do not come with real images. Further, for each image-
shape pair, we need a precise pose annotation that aligns the
shape with its projection in the image.
We overcome these challenges by constructing Pix3D in
three steps. First, we collect a large number of image-shape
pairs by crawling the web and performing 3D scans ourselves.
Second, we collect 2D keypoint annotations of objects in the
images on Amazon Mechanical Turk, with which we optimize
for 3D poses that align shapes with image silhouettes. Third,
we filter out image-shape pairs with a poor alignment and, at
the same time, collect attributes (i.e., truncation, occlusion)
for each instance, again by crowdsourcing.
In addition to high-quality data, we need a proper metric
to objectively evaluate the reconstruction results. A well-
designed metric should reflect the visual appealingness of the
reconstructions. In this paper, we calibrate commonly used
metrics, including intersection over union, Chamfer distance,
and earth mover’s distance, on how well they capture human
perception of shape similarity. Based on this, we benchmark
state-of-the-art algorithms for 3D object modeling on Pix3D
to demonstrate their strengths and weaknesses.
With its high-quality alignment, Pix3D is also suitable for
object pose estimation and shape retrieval. To demonstrate
that, we propose a novel model that performs shape and pose
estimation simultaneously. Given a single RGB image, our
model first predicts its 2.5D sketches, and then regresses the
3D shape and the camera parameters from the estimated 2.5D
sketches. Experiments show that multi-task learning helps to
boost the model’s performance.
Our contributions are three-fold. First, we build a new
dataset for single-image 3D object modeling; Pix3D has a
diverse collection of image-shape pairs with precise 2D-3D
alignment. Second, we calibrate metrics for 3D shape recon-
struction based on their correlations with human perception,
and benchmark state-of-the-art algorithms on 3D reconstruc-
tion, pose estimation, and shape retrieval. Third, we present a
novel model that simultaneously estimates object shape and
pose, achieving state-of-the-art performance on both tasks.
2. Related Work
Datasets of 3D shapes and scenes.
For decades, re-
searchers have been building datasets of 3D objects, either
as a repository of 3D CAD models [
4
,
5
,
50
] or as images
of 3D shapes with pose annotations [
35
,
48
]. Both direc-
tions have witnessed the rapid development of web-scale
databases: ShapeNet [
7
] was proposed as a large repository of
more than 50K models covering 55 categories, and Xiang et
al. built Pascal 3D+ [
65
] and ObjectNet3D [
64
], two large-
scale datasets with alignment between 2D images and the 3D
shape inside. While these datasets have helped to advance the
field of 3D shape modeling, they have their respective limita-
tions: datasets like ShapeNet or Elastic2D3D [
33
] do not have
real images, and recent 3D reconstruction challenges using
ShapeNet have to be exclusively on synthetic images [
68
];
Pascal 3D+ and ObjectNet3D have only rough alignment be-
tween images and shapes, because objects in the images are
matched to a pre-defined set of CAD models, not their actual
shapes. This has limited their usage as a benchmark for 3D
shape reconstruction [60].
With depth sensors like Kinect [
24
,
27
], the community
has built various RGB-D or depth-only datasets of objects
and scenes. We refer readers to the review article from Fir-
man [
14
] for a comprehensive list. Among those, many ob-
ject datasets are designed for benchmarking robot manipula-
tion [
6
,
23
,
34
,
52
]. These datasets often contain a relatively
small set of hand-held objects in front of clean backgrounds.
Tanks and Temples [
31
] is an exciting new benchmark with 14
scenes, designed for high-quality, large-scale, multi-view 3D
reconstruction. In comparison, our dataset, Pix3D, focuses on
reconstructing a 3D object from a single image, and contains
much more real-world objects and images.
Probably the dataset closest to Pix3D is the large collec-
tion of object scans from Choi et al. [
8
], which contains a
rich and diverse set of shapes, each with an RGB-D video.
Their dataset, however, is not ideal for single-image 3D shape
modeling for two reasons. First, the object of interest may
be truncated throughout the video; this is especially the case
for large objects like sofas. Second, their dataset does not
explore the various contexts that an object may appear in, as
each shape is only associated with a single scan. In Pix3D,
we address both problems by leveraging powerful web search
engines and crowdsourcing.
Another closely related benchmark is IKEA [
39
], which
provides accurate alignment between images of IKEA objects
and 3D CAD models. This dataset is therefore particularly
suitable for fine pose estimation. However, it contains only
759 images and 90 shapes, relatively small for shape model-
ing
∗
. In contrast, Pix3D contains 10,069 images (13.3x) and
395 shapes (4.4x) of greater variations.
Researchers have also explored constructing scene datasets
with 3D annotations. Notable attempts include LabelMe-
3D [
47
], NYU-D [
51
], SUN RGB-D [
54
], KITTI [
16
], and
modern large-scale RGB-D scene datasets [
10
,
41
,
55
]. These
datasets are either synthetic or contain only 3D surfaces of
real scenes. Pix3D, in contrast, offers accurate alignment
between 3D object shape and 2D images in the wild.
Single-image 3D reconstruction.
The problem of recov-
ering object shape from a single image is challenging, as it
requires both powerful recognition systems and prior shape
knowledge. Using deep convolutional networks, researchers
have made significant progress in recent years [
9
,
17
,
21
,
29
,
42
,
44
,
57
,
60
,
61
,
63
,
67
,
53
,
62
]. While most of these ap-
proaches represent objects in voxels, there have also been
∗
Only 90 of the 219 shapes in the IKEA dataset have associated images.
of 17
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论