




推断来自阴影中的光场.pdf
50墨值下载

Inferring Light Fields from Shadows
Manel Baradad
1
Vickie Ye
1
Adam B. Yedidia
1
Fr
´
edo Durand
1
William T. Freeman
1,2
Gregory W. Wornell
1
Antonio Torralba
1
1
Massachusetts Institute of Technology
2
Google Research
{mbaradad,vye16,adamy,fredo,billf,gww}@mit.edu, torralba@csail.mit.edu
Abstract
We present a method for inferring a 4D light field of a
hidden scene from 2D shadows cast by a known occluder
on a diffuse wall. We do this by determining how light
naturally reflected off surfaces in the hidden scene interacts
with the occluder. By modeling the light transport as a
linear system, and incorporating prior knowledge about
light field structures, we can invert the system to recover
the hidden scene. We demonstrate results of our inference
method across simulations and experiments with different
types of occluders. For instance, using the shadow cast by
a real house plant, we are able to recover low resolution
light fields with different levels of texture and parallax
complexity. We provide two experimental results: a human
subject and two planar elements at different depths.
1. Introduction
Imagine you are peering into a room through an open
doorway, and all you can see is a white wall and an object
placed just in front of it. Although you cannot see the rest
of the room directly, the object is casting complex shadows
on the wall (see Fig. 1). What information can be deduced
from the patterns these shadows make? Is recovering a 2D
picture of the room possible? What about depth recovery?
The problem of imaging scenes that are not within direct
line of sight has a wide range of applications, including
search-and-rescue, anti-terrorism and transportation [2].
However, this problem is very challenging. Previous
approaches to non-line-of-sight (NLoS) imaging have used
time-of-flight (ToF) cameras or shadows cast by ambient
light to count objects in the hidden scene [28], or to
reconstruct approximate low-dimensional images [3, 23].
In this paper, we attempt a far more ambitious class of
reconstructions: estimating the 4D light field produced by
what remains hidden. The recovered light field would allow
us to view the hidden scene from multiple perspectives and
Figure 1: Example scenario. An observer peers partially
into a room, and she is only able to see two things: a plant
and the shadow it casts on the wall. If the observer can fully
characterize the geometry of the plant, what can she learn
about the rest of the room by analyzing the shadow?
thereby recover parallax information that can tell us about
the hidden scene’s geometry.
Previous NLoS imaging methods that rely on secondary
reflections from a naturally illuminated hidden scene use
the known imaging conditions to approximate a transfer
matrix—a linear relationship between all elements in the
scene to observations on the visible reflector. They
then invert this transfer matrix while simultaneously
incorporating prior knowledge about likely scene structure,
yielding a transformation that takes these observations as
input and returns a reconstruction of the scene.
Our approach is also modeled on these principles, but
prior knowledge plays an even more important role. An
image of the white wall only provides a 2D array of
observations. If we are going to reconstruct a 4D array
of light-field samples from a vastly smaller number of
observations, we must rely much more heavily on our
1
prior distribution over light fields to obtain meaningful
reconstructions. In particular, we can exploit the fact that
elements of real scenes have spectra that are concentrated at
low frequencies [4]. This allows us to reduce the effective
dimensionality of the resulting problem to the point of
tractability.
Our work also suggests that complex occluders can help
reveal disparity information about a scene, more so than
simple ones. This means that a commonplace houseplant
that has a complex structure may be a better computational
light field camera than a simpler pinspeck occluder. This
is consistent with conventional wisdom about occlusions
derived from past work in coded-aperture imaging, such as
in [15].
Even with these insights, our approach relies on having
an accurate estimate of the occluder’s geometry and direct
illumination over what remains hidden. Nevertheless, we
think that our approach provides a strong template for future
progress in NLoS imaging and compelling evidence that the
world around us is covered with subtle, but very rich, visual
information.
2. Background
2.1. NLoS Imaging
Non-line-of-sight (NLoS) imaging is the study of how to
infer information about objects that are not directly visible.
Many approaches to NLoS imaging involve a combination
of active laser illumination and ToF cameras [13, 19, 29].
These methods, called active methods, work by illuminating
a point on the visible region that projects light into the
hidden scene. Then, structure in the scene can be inferred
from the time it takes for that light to return [12, 20, 22, 24].
These methods have been used to count hidden people [28],
or to infer location, size and motion of objects [9, 11, 18].
Other recent approaches, called passive methods, rely
on ambient light from the hidden scene or elsewhere
for inference. These approaches range from using
naturally-occurring pinholes or pinspecks [7, 23] to using
edges [3] to resolve the scene. Our work can be thought
of as the extension of these same principles to arbitrary
known occluders. To our knowledge, this work is the
first to demonstrate reconstructions of 2D images from
arbitrary known occluders in an NLoS setting, let alone
reconstructions of 4D light fields.
2.2. Light field reconstructions
There has been ample prior work on inference of the
full light field function for directly-visible scenes. This
problem is addressed in [6], [8], [14], [21], [26], [27],
among others. Notably, the work of [21] estimates a full 4D
light field from a single 2D image of the scene. However,
this learning-based method is trained on very constrained
Observed
pixels
=
...
Transfer matrix
Unoccluded
light �eld
D
x
u
l(x, u)
Hidden scene
Scene plane
Occluder
Observation plane
a)
b)
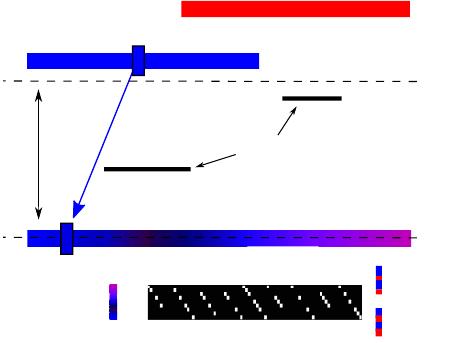
Figure 2: a) Simplified 2D scenario, depicting all
the elements of the scene (occluder, hidden scene and
observation plane) and the parametrization planes for the
light field (dashed lines). (b) Discretized version of the
scenario, with the light field and the observation encoded
as the discrete vectors x and y, respectively. The transfer
matrix is a sparse, row-deficient matrix that encodes the
occlusion and reflection in the system.
domain-specific data and is unable to accurately extend to
novel images. This past work, particularly [14], heavily
informed our choice of prior over light fields, which we
discuss at length in Sec. 5.
3. Overview
In order to reconstruct light fields using secondary
reflections from the scene, our imaging method has two
main components. The first is a linear forward model
that computes observations from light fields, i.e. a transfer
matrix A, that has many columns but is sparse. The transfer
matrix for an arbitrary scene is depicted schematically in
Fig. 2.
The second is a prior distribution on light fields that
allows reducing the effective dimensionality of the inverse
problem, turning this ill-posed problem into one that is
well-posed and computationally feasible. This strategy is
better than other methods for reducing the dimensionality
of the inverse problem (for example, naively downsampling
the forward model and inverting). Light field sampling
theory [5] and novel light field priors [14] inform how we
reduce the dimensionality of the inverse problem given mild
assumptions of the elements that produce the light field to
be recovered.
In Section 4, we describe our model for how light
propagates in the scene as well as our mathematical
representations for each of its components. These choices
of 10
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论