




西门子基于LMS大样本统计学的转向控制环的反向运动学求解.pdf
50墨值下载
基于LMS大样本统计学的转向控制环的反向运动学求
解
庆安集团有限公司 戴翔、陈志凌
摘要:
空间反向运动学通常需要复杂的运算和推导,要得到其解析表达式需要深厚的数学知识。
本文以3-PRS威力,通过Virtual.Lab
Motion建立运动学模型生成大量的运动数据样本,利用Matlab数据处理近似求解出空间机
构的解析表达,其精度完全可以满足实际需要。
关键字: 运动学、MATLAB、空间机构
1. 模型简介
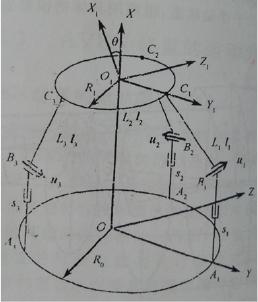
转向控制环(以下简称A9环)等效的3-
PRS并联机构简图如图1所示。由动平台、固定基座以及三条拓扑结构完全相同的
支链组成。
图1 3-PRS并联机构简图
对于每一条支链而言,是由定长连杆在一端 通过球面副与动平
( 1, 2,3)
i
C i
台相连,在另一端 通过转动副与滑块相连,该滑块可以沿着固定于基
( 1, 2,3)
i
B i
座的滑道上下移动。机构中各构件的布置采用对称方式,三条滑道垂直于固定基
座并互成120°分布,转动副的转动轴线与滑道沿线及点O到转动副中心连线垂直
,球面副亦互成120°均匀分布在动平台上。从而动平台和固定基座可以分别简化
为圆,并且当三个滑块处于同一高度时,也组成一个圆。
由机构自由度计算公式可知3-PRS并联机构是一个3自由度的机构
1
6(n m 1)
m
i
i
F f
式中,F——机构的自由度;
n——机构中包含的构件总数;
m——机构中的运动副数目;
f
i
——第i个运动副的自由度数。
对于3-
PRS并联机构n=8,m=9,对应于每个移动副和转动副有 ,对应于每个球面
1
i
f
副有 ,代入方程可以得到 。
3
i
f
3F
动平台的三个独立自由运动分别为绕着惯性坐标系的X轴和Y轴的转动,以
及沿着Z轴的平移。
3-
PRS并联机构的位置逆解问题可以归结为,已知动平台的位姿即给定 (法线相
对于Y轴的转角)、 (法线相对于X轴的转角)和z(动平台中心位置在Z轴的坐标
分量),求解驱动副的行程即三个滑块沿Z轴方向的移动距离 。
( 1,2,3)
i
d i
本项目中假定动平台z向不发生运动,通过Motion 建立3-
PRS并联机构的三维运动学模型,在给定动平台位姿角 、 的情况下,通过Mat
lab进行数据拟合,求解三个滑块沿Z轴方向的移动距离 的数学表达
( 1,2,3)
i
d i
式。
of 19
50墨值下载
【版权声明】本文为墨天轮用户原创内容,转载时必须标注文档的来源(墨天轮),文档链接,文档作者等基本信息,否则作者和墨天轮有权追究责任。如果您发现墨天轮中有涉嫌抄袭或者侵权的内容,欢迎发送邮件至:contact@modb.pro进行举报,并提供相关证据,一经查实,墨天轮将立刻删除相关内容。
下载排行榜

评论